ワイヤ干渉駆動型超長尺多関節アーム "Super Dragon"

(2016年~)Super Dragonは全長10 m,体幹径0.2 m,10関節を持つロボットアームである.図1のように先端に搭載したカメラを空間的に広い範囲に運ぶことができる.Super Dragonは福島第一原発の格納容器内部のような人が立ち入ることができない,奥まった場所の探査を見据えて開発された.全長が長く,体幹が細く,多くの関節を備えたロボットアームは安全な場所から格納容器内部に姿勢を変えながら侵入し,様々な場所を探査することが期待できる.
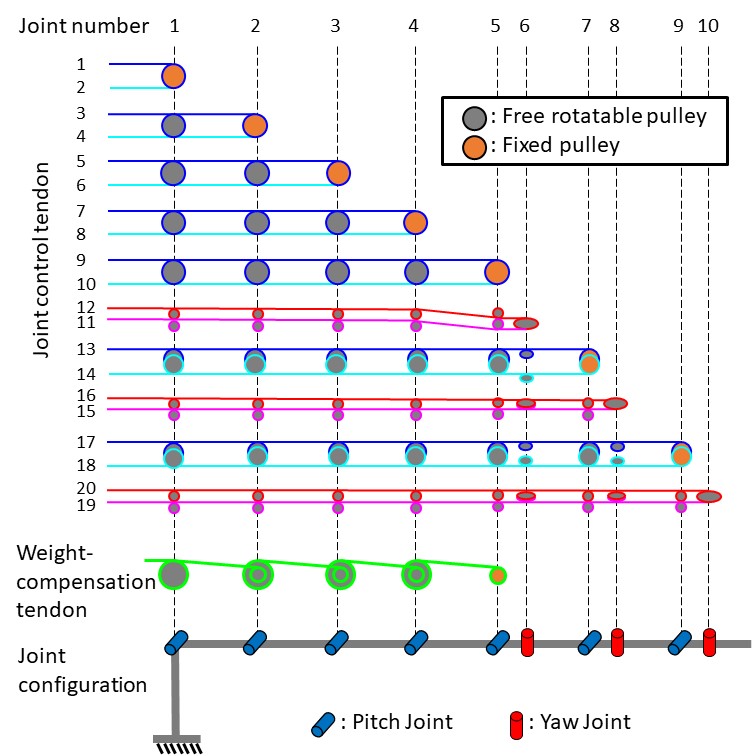
しかし,長い全長と相まって体幹の自重が大きなモーメントとして関節に負荷されるため,高耐荷重な関節駆動機構が必要である.そこで,3つの機構要素を組み合わせることで全長10 mを支持するに耐える駆動機構を実現している.1つ目は「ワイヤ干渉駆動機構」である.人の指を動かす腱にアナロジがあり,先端側の関節を駆動する腱が根元側の関節でもトルクを生成する干渉効果を活用し,自重による負荷が大きな根本側の関節ほど多くの腱で支えることができる機構となっている.図2はSuper Dragonの腱の配置と関節配置を表したもので,赤,青の線がワイヤ干渉駆動機構の腱を示している.2つ目の要素はワイヤ干渉駆動の原理と2重プーリによる「自重補償機構」である.根本側の5関節において,ワイヤ干渉駆動機構でも支えきれない莫大な自重によるモーメントを支えている.図2中の緑線が自重補償機構を構成する1本の腱を示している.3つ目は「化学繊維ロープ」である.鋼鉄製ワイヤロープよりも高強度であり,機構の耐荷重を向上させた重要な要素である.化学繊維ロープを用いた設計には機械的諸特性を調査した研究成果が活用されている.
さらに,アームを支える腱の張力は数 kNと大きく,それに伴う腱の伸びはアームの関節制御の課題となる.体幹に働く重力は関節角制御を不安定化させる因子として働き,とくにアームの体幹を上に持ち上げた姿勢ではこの不安定性が顕在化する.この不安定性に打ち勝つだけの剛性を持った腱があれば問題ないものの,たとえ鋼鉄の剛性を仮定しても十分でない.そこで,重力と腱の剛性のバランスから関節角の安定性を指標化し,関節角が不安定になってしまう姿勢を避けて先端に備えたカメラを所望の目的位置に移動させるマニピュレーション動作の計画法を提案した.それに先立ち,関節角の安定性を左右するロープの伸び特性のモデル化と測定,関節数よりも本数が冗長な腱の張力の定める手法などの研究を行い.最終的に,Super Dragonの先端に備えた5kgの錘を不安定な挙動なく運搬する動作実験を行った.
| 全長 | 10 m |
| 体幹径 | 0.2 m |
| 関節数 | 10 |
| 腱の本数 | 21 |
| アーム部の質量 | 約50 kg |
| 基部の質量 | 推定200 kg |
発表論文・学会
- G. Endo, A. Horigome and A. Takata, "Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator," in IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 934-941, April 2019, doi: 10.1109/LRA.2019.2894855. [PDF]
- 遠藤玄, 髙田敦, 堀米篤史. ワイヤ干渉駆動型超長尺多関節アームSuper Dragonの開発, 日本機械学会論文集, vol. 85, no. 875, Jun. 2019. [PDF]
- Takata, H. Nabae, K. Suzumori and G. Endo, "Tension Control Method Utilizing Antagonistic Tension to Enlarge the Workspace of Coupled Tendon-Driven Articulated Manipulator," in IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 6647-6653, Oct. 2021, doi: 10.1109/LRA.2021.3094489. [PDF]
- G. Endo, A. Horigome, A. Takata. Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator, IEEE/Int’l Conf. on Robotics and Automation(ICRA2019), MoB1-03.2, Montreal, May. 2019. [PDF]
- A. Takata, H. Nabae, K. Suzumori, G. Endo. “Tension Control Method Utilizing Antagonistic Tension to Enlarge the Workspace of Coupled Tendon-driven Articulated Manipulator,” IEEE/RSJ Int’l Conf. on Intelligent Robots and Systems(IROS 2021), TuCT19.4, Prague, Sep. 2021 [PDF]
- 遠藤玄, 堀米篤史, 髙田敦. 化学繊維ワイヤによる干渉駆動を用いた超長尺多関節アーム, 第24回ロボティクスシンポジア, 2A4, 黒部, Mar. 2019. [PDF]
- Atsushi Horigome, Gen Endo, Koichi Suzumori, Hiroyuki Nabae. Design of a Weight-compensated and Coupled Tendon-driven Articulated Long-reach Manipulator, 2016 IEEE/SICE International Symposium on System Integration (SII2016), Proceedings of the 2016 IEEE/SICE International Symposium on System Integration, IEEE, pp. 598-603, Dec. 2016. [PDF]
- 髙田敦, 難波江裕之, 鈴森康一, 木倉宏成, 高橋秀治, 遠藤玄. 化学繊維ロープを用いたワイヤ干渉駆動型多関節アームの安定性解析, 第39回日本ロボット学会学術講演会, 第39回日本ロボット学会学術講演会講演予稿集, 一般社団法人日本ロボット学会, 2I2-07, 上田, Sept. 2021. [PDF]
- 髙田敦, 難波江裕之, 鈴森康一, 木倉宏成, 高橋秀治, 遠藤玄. ワイヤ干渉駆動型超長尺多関節アームSuper Dragonの実規模スケールにおける探索動作の位置精度調査, 日本機械学会ロボティクス・メカトロニクス講演会2021, ロボティクス・メカトロニクス講演会2021講演論文集, 一般社団法人 日本機械学会, 2A1-O03, 大阪, June 2021. [PDF]
- 髙田敦, 難波江裕之, 鈴森康一, 遠藤玄. 自重補償機構を有するワイヤ干渉駆動型冗長マニピュレータの逆運動学, 第21回計測自動制御学会システムインテグレーション部門講演会, 3E1-04, 福岡, Dec. 2020. [PDF]
- 髙田敦, 遠藤玄, 鈴森康一, 難波江裕之. ワイヤ干渉駆動型超長尺多関節アームSuper Dragonの手先位置決め精度の検討, 日本機械学会ROBOMECH2019, 1A1-R10, 広島, Jun. 2019. [PDF]
- 堀米篤史, 遠藤玄, 鈴森康一. 超長尺ワイヤ駆動型多関節アームの開発―干渉ワイヤ駆動機構と自重補償機構による駆動方式の提案―, 日本機械学会ロボティクス・メカトロニクス講演会2016, ロボティクス・メカトロニクス講演会2016講演概要集, 一般社団法人 日本機械学会, 2P1-15a5, June 2016. [PDF]
拡張型Super Dragon

(2019年~)拡張型Super Dragonは回転関節型ロボットアームSuper Dragonの先端にテレスコピック構造の直動型アームを取り付け,延べの全長を15.4 mとしたものである(図1).
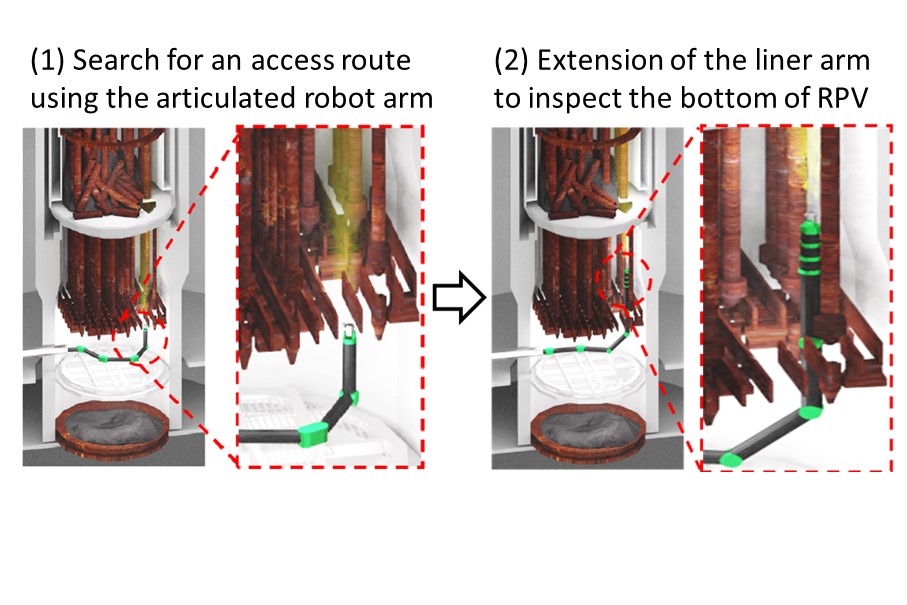
本研究の背景として,福島第一原発の廃止作業に向けて,格納容器底部に溶け落ちたデブリだけでなく,原子炉圧力容器に残ったデブリの所在も調査する必要があると考えられる. そこで,我々のグループは長尺回転関節型アームの先端に直動関節型アームを連結させたロボットシステムにより,圧力容器の下方向からアクセスする方式を提案している. 図2はロボットアームによる圧力容器へのアクセスの概念図である.圧力容器を下から見上げ,デブリが溶け落ちてできた隙間を探し,直動関節型アームを伸展させ圧力容器にアクセスする. この調査方式の実現に必要な技術として,テレスコピック構造を用いた直動関節型アームを開発した. 図3が開発したアームであり,左が収縮した状態,右が最大伸展した状態である. テレスコピック構造は4 本のCFRP パイプで構成されており,基部のパイプの最外径は82 mmである. この内側に径が順に小さくなる残り3本のパイプが重なって格納されており,テレスコピックな構造をとっている. 最も収縮した状態の長さは2.1 m,最も伸展した状態での長さは6.3 mである. 基部のパイプを基準とした3段のパイプの伸展は1本の腱で劣に駆動される. 腱には化学繊維ロープを用いている. この腱の一端は基部に備えられた電磁モータによって巻き取られ,もう一端はテレスコピック構造の上端,すなわち最も細いパイプの上側端面に固定される. その中間での腱の経路は,あるパイプの下側端面からパイプ内部を通り,同パイプの上側端面でさらに内側のパイプの下側端面に向かう. すなわち,テレスコピック構造が最も伸展した状態では腱の折り返しが小さく,巻取モータとテレスコピック構造上端は短い経路長で結ばれ,逆にテレスコピック構造が最も収縮した状態では腱の折り返しが最も大きく腱の経路長が長くなる. 従って,モータの巻取量でテレスコピック構造全体の伸展変位を制御している. ところで,腱は引張ることしかできないため,テレスコピック構造を腱によって収縮させることはできない. そのため,テレスコピック構造を収縮させる力としては重力とパイプ軸上に備えられた天然ゴムの紐の弾性力を利用している. 天然ゴムの紐の一端は基部に,もう一端はテレスコピック構造上端に固定されている. 腱をモータによって緩めると重力と弾性力がテレスコピック構造を収縮させる.
| 収縮時長さ | 2.1 m |
| 最大伸展時長さ | 6.3 m |
| 体幹径 | 0.08 m |
| 駆動自由度 | 1 |
| 伸展する段数 | 3 |
| アーム部の質量 | 6.3 kg |
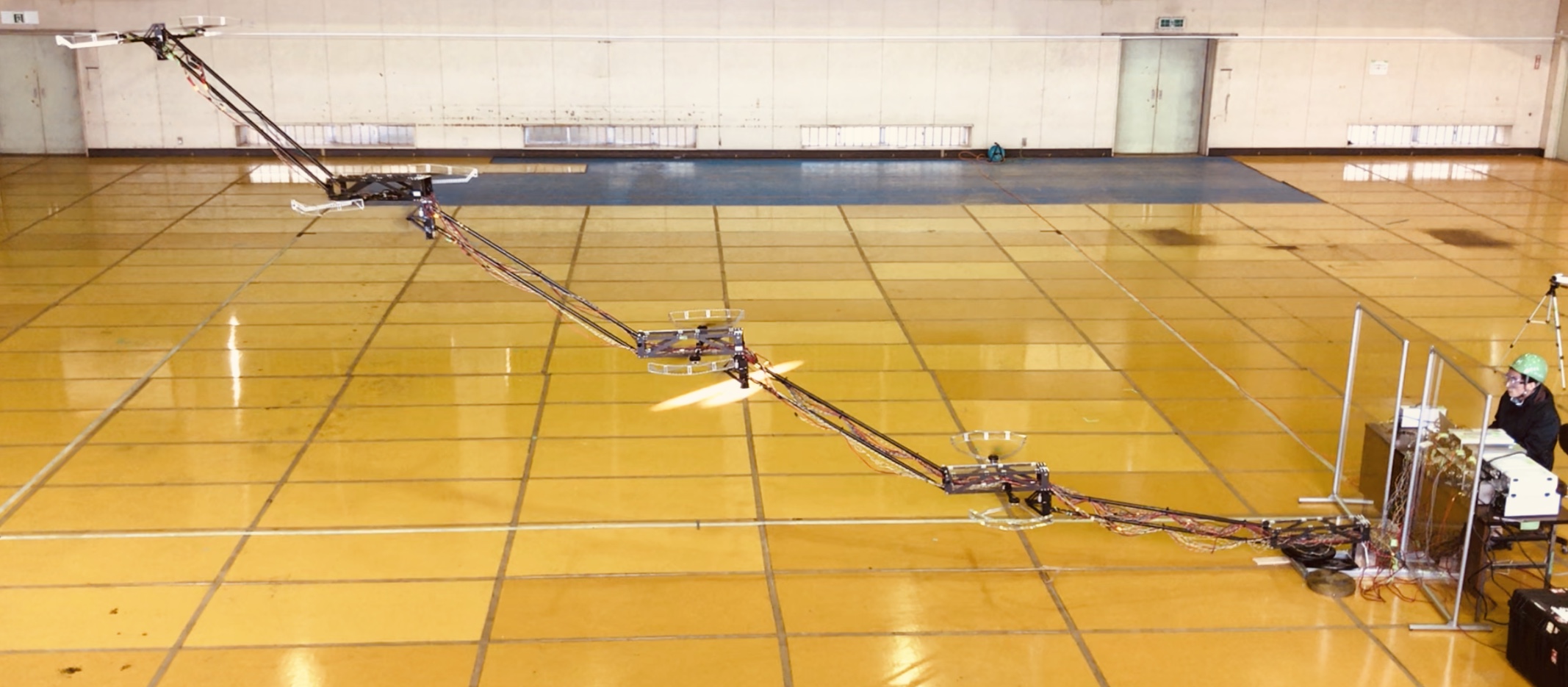
調査方式の実現可能性を探るため,我々の研究室で開発した長尺ロボットアームSuper Dragonと 直動アームを統合し,拡張型Super Dragonを開発した. 先端節の構造を取り外し全長9.1 mとなったのSuper Dragonに開発した直動関節型アームを取り付け,最大延べ長さ15.4 m のシステムとし,動作実験を行った. まず,拡張型Super Dragon全体が水平に設置された状態から直動関節型アームを垂直に立てる動作を実証した. 続いて,直動関節型アームを垂直に立てた状態で2 段まで展開し,Super Dragonを駆動してアーム全体を持ち上げ,水平に保持する動作を実証した. そのときの様子が図1であり,このときのアーム長さは13.7 m であった. この動作実験の間,アーム先端のカメラで撮影を行った. 建物壁面に設置したターゲットマークの撮影に成功しただけでなく, 記録画像からStructure from motionにより3次元点群を再構成したところ良好な結果を得た.

発表論文・学会
- 鄭冰, 難波江裕之, 鈴森康一, 木倉宏成, 高橋秀治, 遠藤玄. 原子炉圧力容器調査のための軽量テレスコピックブームの開発, 日本機械学会ロボティクス・メカトロニクス講演会2021, ロボティクス・メカトロニクス講演会2021講演論文集, 一般社団法人 日本機械学会, June 2021. [PDF]
- (予定)遠藤玄, 永井敏也, 髙田敦, 木倉宏成, 高橋秀治. 拡張型スーパードラゴン多関節ロボットアームによる遠隔探査手法の開発(2)多関節ロボットアームの開発, 日本原子力学会 2022年春の年会, March 2022.
- (予定)永井敏也, 鄭冰, 髙田敦, 木倉宏成, 高橋秀治, 遠藤玄. 直動型テレスコピックブームによる 拡張型Super Dragon 多関節ロボットアームの開発, 日本機械学会ロボティクス・メカトロニクス講演会2022, ロボティクス・メカトロニクス講演会2022講演論文集, 一般社団法人 日本機械学会, June 2022.
スラスタ駆動型軽量長尺多関節アーム "飛龍-II"
.png)
.png)
(2018~2020) 第一次試作機"飛龍-I"では,長尺化すると左右方向に駆動するヨー軸トルクが基部に累積してしまうことにより,サーボモータの定格を超え,制御不能となる課題があった.そこで,"飛龍-II"ではヨー軸の駆動にもスラスタを用いる構成とした."飛龍-II"の外観を図1に示す.ヨー軸のスラスタは各節の先端部に装備することにより,モーメントアームを長く稼ぐことにより,大きな駆動トルクを発生させることが出来る.
また,長尺化に伴い,平行リンク機構の長手方向へのねじれが発生し,スラスタが傾いてしまい,ヨー軸の制御性が低下する問題が顕在化したため,慣性計測装置(IMU)を各節先端部に搭載し,左右の駆動スラスタに推力差をつけることによりねじれの補正を行っている.
開発した第二次試作機"飛龍-II”は,全長6.6 mモデルでの手先位置制御,0.6 kgのペイロードを保持した状態での浮上に成功している.またリンク長を延長することで全長8.8m, 12 mの試作機でも浮上に成功している(図2, 3).
発表論文・学会
- 上野雄祐, 遠藤 玄, 鈴森 康一, 難波江裕之, 萩原哲夫. スラスタ駆動型軽量長尺多関節アーム“ 飛龍-II ”の開発―姿勢変化によるアーム長手軸周りモーメントの補償方法の検討―, 日本機械学会ロボティクス・メカトロニクス講演会, 1P2-D05 (2019) [PDF]
- Yusuke Ueno, Tetsuo Hagiwara, Hiroyuki Nabae, Koichi Suzumori, Gen Endo. Development of Hiryu-II: A Long-Reach Articulated Modular Manipulator Driven by Thrusters, IEEE Robotics and Automation Letters, Vol. 5, Issue 3, pp.4963-4969 (2020) [DOI]
- 上野雄祐, 萩原哲夫, 難波江裕之, 鈴森 康一, 遠藤 玄. スラスタ駆動型超長尺多関節アーム”飛龍-II”の開発 -6.6 m試作機の実現-, 日本機械学会ロボティクス・メカトロニクス講演会, 2A1-B11 (2020) [PDF]
- 上野雄祐, 萩原哲夫, 難波江裕之, 鈴森康一, 遠藤玄. スラスタ駆動型超長尺多関節アーム“ 飛龍-II ”の開発 -12 m 試作機の浮上実験-, 日本機械学会ロボティクス・メカトロニクス講演会, 1P2-B15 (2021) [PDF]
- 中出尚宏,難波江裕之,鈴森康一,萩原哲夫,遠藤玄,”スラスタ駆動型超長尺多関節アーム”飛龍-III”の開発―ワイヤープーリ系による平行リンク機構と中空パイプを用いたねじり剛性の向上― ”,日本機械学会ロボティクス・メカトロニクス講演会, 1P2-B09 (2021) [PDF]
- Yusuke Ueno, Tetsuo Hagiwara, Hiroyuki Nabae, Koichi Suzumori, Gen Endo. Empirical Study of a Long-Reach Articulated Modular Manipulator Driven by Thrusters, IEEE/SICE Int. Symposium on System Integration (SII), pp. 452-458 (2022) [DOI]
スラスタ駆動型軽量長尺多関節アーム "飛龍-I"
.jpg)
.jpg)
(2017~2018)スラスタ駆動型軽量長尺多関節アーム"飛龍"は,スラスタを用いて自重補償を行う長尺のロボットアームである.従来のロボットアームは,各関節にモータなどのアクチュエータを装備し,これにより関節を駆動する手法が主流である.しかし,この手法は長尺になるにつれ,根本近くの関節に負荷されるトルクが膨大なものとなるため,長尺化が困難という課題がある.また,スラスタを用いて駆動するロボットとして,ドローンを代表とするマルチコプタが近年盛んに研究されているが,バッテリ駆動のため,インフラ点検時などに必要とされる長時間の駆動が困難であったり,機械的に移動範囲を制限するものがないため,制御不能時の墜落場所が予測できないなどの危険性もある.
そこで,"飛龍"シリーズでは各関節にそれぞれ自重補償用のスラスタを装備し,これを用いて自重補償と関節の駆動を行う.本アームではスラスタとしてプロペラを利用している.自重補償を行うためにはスラスタの軸を常に垂直方向に保つ必要がある.これを実現するために,本アームでは平行リンク機構を用いてプロペラの軸を鉛直に保っている(図1).本アームでは電源や制御信号はリンクに沿って有線で行っているため,バッテリー切れの心配無く長時間の駆動が可能である.さらに,基部に自重トルクが蓄積しない機構であるため,十分な電源が確保されていれば任意に節数を増やすことが可能である.
試作第一号機である"飛龍-I"の外観を図2に示す.プロペラ軸を鉛直に保つため,四節平行リンク機構を導入している."飛龍-I"では,プロペラによる駆動は上下方向のみであり,左右方向の駆動はサーボモータを用いている.3節3mモデルでの浮上・制御に成功した.
発表論文・学会
- 遠藤玄, 中村吉秀, 萩原哲夫, 難波江裕之, 鈴森康一, "スラスタ自重補償型長尺多関節アーム”飛龍-I”の開発", 日本機械学会ロボティクス・メカトロニクス講演会, 1P1-C07 (2018) [PDF]
- Gen Endo, Tetsuo Hagiwara, Yoshihide Nakamura, Hiroyuki Nabae, Koichi Suzumori, A Proposal of Super Long Reach Articulated Manipulator with Gravity Compensation using Thrusters, IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp.1414-1419 (2018) [PDF]
バルーン型ジャコメッティアーム
発表論文・学会
- 武市将 , 鈴森康一 , 遠藤玄 , 難波江裕之, バルーン型ジャコメッティアーム2号機の試作, 第34回日本ロボット学会学術講演会, RSJ2016AC2U1-05 (2016) [PDF]
- Masashi Takeichi, Koichi Suzumori, Gen Endo, and Hiroyuki Nabae, Development of Giacometti Arm With Balloon Body, IEEE Robotics and Automation Letters, Vol.2, Issue.2, pp.951-957 (2017) [DOI]
- 武市将, 鈴森 康一, 遠藤 玄, 難波江 裕之, 20mバルーン型 ジャコメッティアームを用いたモックアップ施設における機能検証実験, 日本機械学会ロボティクス・メカトロニクス講演会, 1P2-D01 (2017) [DOI]
- Masashi Takeichi, Koichi Suzumori, Gen Endo, and Hiroyuki Nabae, Development of Giacometti Arm With Balloon Body, Int. Conf. on Robotics and Automation, TUB1.8 (2017) [PDF]
- Masashi Takeichi, Koichi Suzumori, Gen Endo, and Hiroyuki Nabae, Development of a 20-m-long Giacometti Arm with Balloon Body Based on Kinematic Model with Air Resistance, Int. Conf. on Intelligent Robots and Systems, TuAT9.6, pp.2710-2716 (2017) [DOI]