TITAN-E1
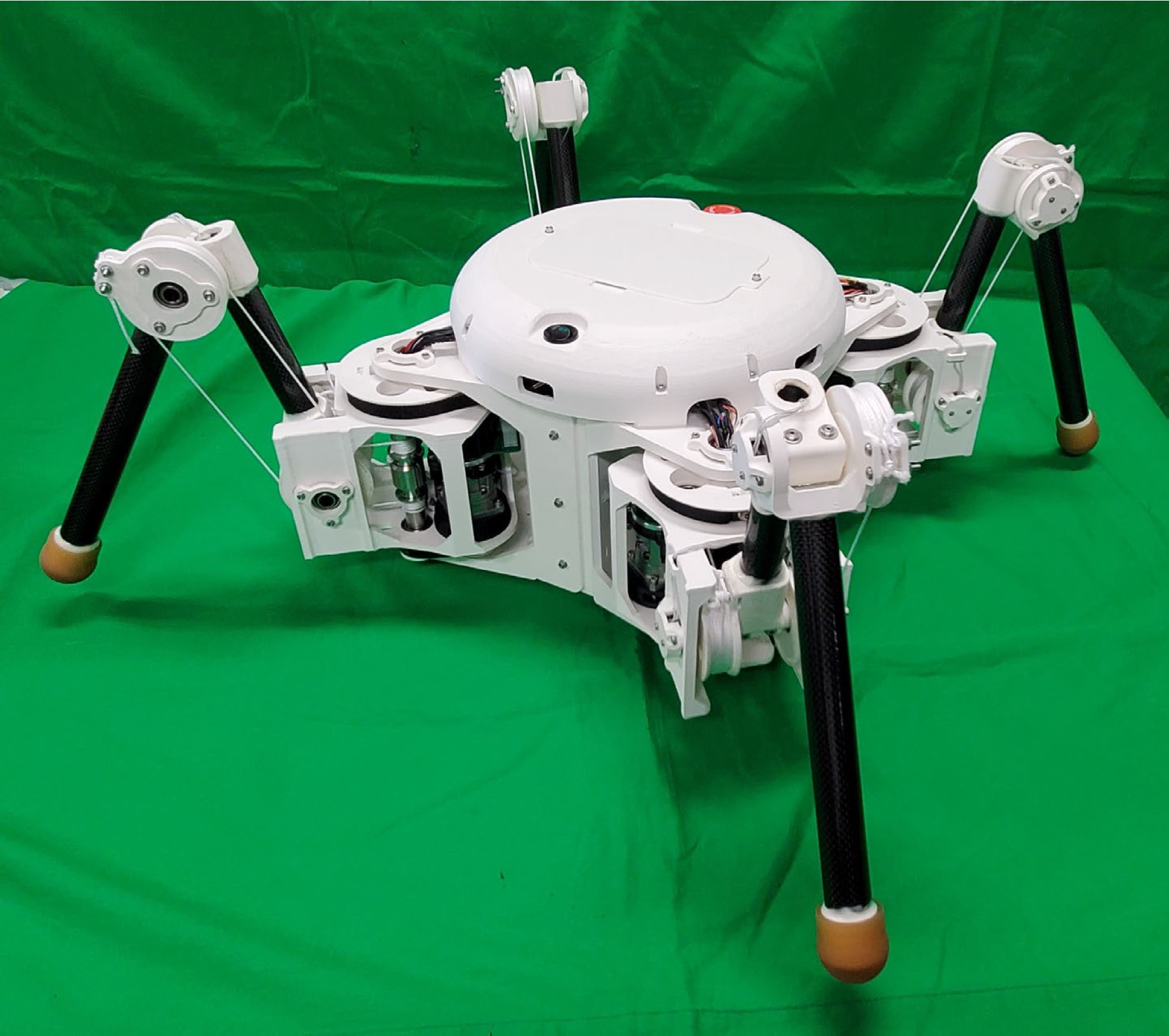
本学において継続的に開発されてきた,爬虫類型の四脚歩行ロボットの最新作,TITAN-E1を開発しました.詳細は日本機械学会ロボティクス・メカトロニクス講演会ROBOMECH 2022 in Sapporoにて発表を行います!
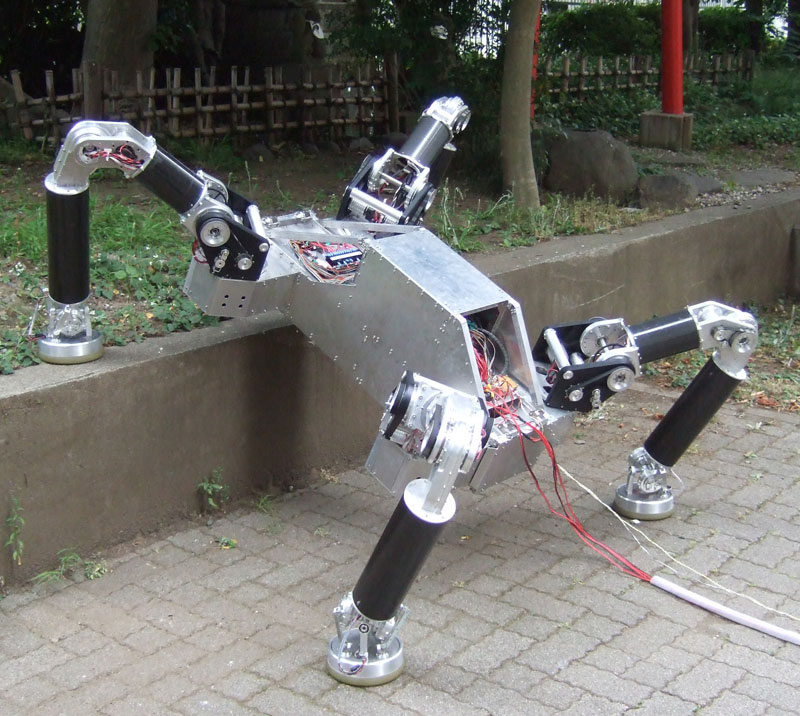
軽量四足歩行ロボット "TITAN-XIII"
発表論文・学会
- 北野智士, 広瀬茂男, 遠藤玄, 小型軽量4 脚歩行ロボット TITAN-XIII の開発 新素材ワイヤを用いた駆動機構による脚機構設計, 第30回日本ロボット学会学術講演会, 3I1-3 (2012)[PDF]
- 北野智士, 遠藤玄, 広瀬茂男, 軽量4足歩行ロボットTITAN-XIIIの開発, 日本機械学会ロボティクス・メカトロニクス講演会, 1A1-P12 (2013)[PDF]
- Satoshi Kitano, Shigeo Hirose, Gen Endo, Edwardo F. Fukushima, Development of Lightweight Sprawling-type Quadruped Robot TITAN-XIII and its Dynamic Walking, Int. Conf. on Intelligent Robots and Systems (IROS), pp.6025-6030 (2013)[PDF]
- 北野智士, 広瀬茂男, 遠藤玄, 鈴森康一, 軽量4 足歩行ロボットTITAN-XIIIの開発 第2報: 加減速を考慮した前後揺動型間歇トロットによる高速歩行, 日本機械学会ロボティクス・メカトロニクス講演会, 2A2-N09 (2015)[PDF]
- Satoshi Kitano, Shigeo Hirose, Atsuhi Horigome, Gen Endo, TITAN-XIII: sprawling-type quadruped robot with ability of fast and energy-efficient walking, ROBOMECH Journal, Vol. 3, No.8, DOI: 10.1186/s40648-016-0047-1 (2016)
- 北野智士, 広瀬茂男, 遠藤玄, 4足歩行ロボットTITAN-XIII の設計と開発, 設計工学, DOI:10.14953/jjsde.2016.2690 (2016)
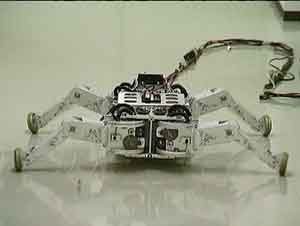
能動足首搭載型四足歩行ロボット "TITAN-XII"
発表論文・学会
- 小松洋音, 尾形勝, 程島竜一, 遠藤玄, 広瀬茂男, 足歩行ロボットTITAN XIIの開発と大型障害物踏破力学の基本的検討, 第17回ロボティクスシンポジア, pp.496-502 (2012)[PDF]
- Hirone Komatsu, Masaru Ogata, Ryuichi Hodoshima, Gen Endo, Shigeo Hirose, Development of Quadruped Walking Robot TITAN-XII and Basic Consideration about Mechanics of Large Obstacle Climbing, IFToMM Asian Conf. on Mechanism and Machine Science, ID112 (2012)[PDF]
- 小松洋音, 遠藤玄, 広瀬茂男, 能動足首搭載型4足歩行ロボットTITAN XII の開発 第3報:能動足先車輪の搭載と動作実験, 日本機械学会ロボティクスメカトロニクス講演会, 1A2-P15 (2013)[DOI]
- Hirone Komatsu, Gen Endo, Ryuichi Hodoshima, Shigeo Hirose, Edwardo F. Fukushima, Basic Consideration about Optimal Control of a Quadruped Walking Robot during Slope Walking Motion, Workshop on Advanced Robotics and its Social Impacts, pp.224-230 (2013)[DOI]
- 小松 洋音, 尾形 勝, 程島 竜一, 遠藤 玄, 福島 E. 文彦, 広瀬 茂男, 4足歩行ロボットTITAN XIIの開発とその大型障害物踏破制御に関する基礎的研究, 日本機械学会論文集, Vol.80, No.83, (2014)[DOI]
- Hirone Komatsu, Gen Endo, Ryuichi Hodoshima, Shigeo Hirose, Edwardo F. Fukushima, How to optimize the slope walking motion by the quadruped walking robot, Advanced Robotics, Vol.29, No.23 (2015) [DOI]
圃場モニタリングロボット "HexaLegs"

発表論文・学会
- 伊藤祐太, 深津時広, 桑原裕之, 遠藤玄, 福島E.文彦, 高度かつ汎用的な計測を可能とする移動型フィールドサーバの開発―軽作業用ロボットアームの開発―, 計測自動制御学会第14回システムインテグレーション部門講演会, pp.2675-2676 (2013)
- 深津時広, 遠藤玄, 伊藤祐太, 小林一樹, 斉藤保典, 移動型フィールドサーバによる作物の広域・詳細情報取得を目指した圃場モニタリングシステムの開発, 日本機械学会ロボティクスメカトロニクス講演会, 1P2-V05 (2014)
- 深津時広, 遠藤玄, 伊藤祐太, 小林一樹, 斉藤保典, 広域・精細モニタリングのための移動作業型フィールドサーバの開発, 農業情報研究, Vlo.23, No.4, pp.140-153 (2014)[DOI]
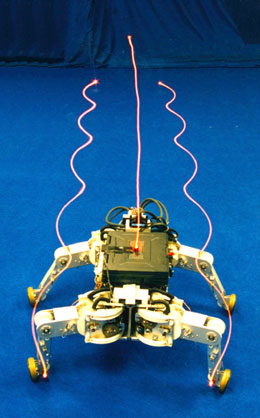
脚車輪ハイブリッド移動体 "Roller-Walker"
(1994~2012年)現在,不整地で高い踏破性を発揮する脚型移動ロボットと,硬平地で高速な移動を実現する車輪型ロボットの両方の特質を兼ね備えた脚―車輪ハイブリッド型移動体が注目されている.これまで試作された車体のほとんどは,歩行機械の脚先あるいは胴体に能動車輪を付加したものであった.この車輪には,駆動系と操舵系のアクチュエータが付加されるため,かなり重量がかさんでいた.その結果,歩行モードにおいては脚を軽快に振ることができず,歩行機械としての特性は限定されていた.
この問題を解決するため,提案するRoller-Walkerは歩行機械の足裏を倒すとそれが受動車輪となり,脚を動かしてローラースケートのように推進する機構を有している(Fig.1、2(a), (b)).このような構造であるためRoller-Walkerの脚には車輪走行するための付加機構が実質的にほとんどなく軽量である.また歩行のための駆動系が車輪移動にも使用されるため,車体全体としても余分な自由度を装備せず軽量化できている.そのため,Roller-Walkerは脚運動性と車輪運動性の両方とも十分な性能を発揮することができる.ただし受動車輪で推力を出し,操舵もするための脚の運動制御法はこれまで世界的にもまったく検討されていない.そのため我々はRoller-Walker特有の脚軌道運動の生成法を検討した.Fig.3, 4, 5は得られた一つの運動例である.
開発したRoller-Walker実験機(Fig.1)は,普及型4脚歩行機械TITAN-VIIIの脚先に受動車輪を装備し足首可変機構を付加している.高さ0.25m,左右幅0.6m,前後長0.5m,全質量24kg,ハイブリッド化に伴う重量増加はTITAN-VIII本体の7%に抑えられている.ワイヤとプーリを用いた平行リンク機構により,車輪のキャンバー角は脚位置に関わらず胴体に対して常に一定に保たれる.
不整地ではTITAN-VIII同様歩行を行い,硬平地上ではFig.3に示すような軌道を左右対称に周期的に動かすことにより推進する.また車輪の進行方向に対する傾き角がちょうど推進に対する減速機の役割を果たすため,適切に脚軌道を調節することにより,斜面の登坂から高速推進まで同一の機構で実現できる特長がある.高速推進実験では,歩行時の10倍を越えるおよそ2.2m/sの速度で直進できることを確認している。またそのときの移動効率は歩行時の8倍を達成している.
|
Fig.1 Wheeled locomotion and trajectory |
Fig.2a Walking mode
Fig.2b Skating mode |
|
Fig.3 Leg trajectory refered from the body coordinate |
Fig.4 Figure 8 propulsion |
|
Fig.5 Rotational motion |


発表論文・学会
- 広瀬 茂男, 竹内 裕喜; ローラウォーカ:新しい脚-車輪ハイブリッド移動体の提案, 日本機械学会誌(C編), 62, 599, pp.242-248 (1996)
- Shigeo HIROSE, Hiroki TAKEUCHI; Roller-Walker: A Proposal of New Leg-Wheel Hybrid Mobile Robot, Proc. Int. Conf. on Advanced Robotics, pp.917-922 (1995)
- Gen Endo, Shigeo Hirose; Study on Roller-Walker ( Multi-mode Steering Control and Self-contained Locomotion ), Proc. Int. Conf. on Robotics and Automation, pp. 2808-2814 (2000) [PDF]
- 遠藤玄,広瀬茂男; ローラーウォーカーに関する研究 -システムの構成と基本的動作実験-,日本ロボット学会誌,Vol.18, No.2, pp.270-277 (2000) [PDF]
- 遠藤玄,広瀬茂男; ローラーウォーカーに関する研究 -基本的運動の生成と自立推進実験-, 日本ロボット学会誌,Vol.18, No.8, pp.1159-1165 (2000) [PDF]
- 遠藤玄,広瀬茂男; ローラーウォーカーに関する研究-脚軌道による推進特性の適応的調節-,日本ロボット学会誌,Vol.26,No.6,pp.691-698 (2008) [PDF]
- Gen Endo, Shigeo Hirose; Study on Roller-Walker - Improvement of Locomotive Efficiency of Quadruped Robots by Passive Wheels, Advanced Robotics, Vol. 26, Issue 8-9, pp. 969-988 (2012) [PDF]