研究概要
機械における動力伝達では歯車が代表的な機構要素であるが,ワイヤロープ,チェーンといった可とう性のある素材で動力を伝える機構も利用されており,これらは腱駆動機構と呼ばれる. 動きの変換の様態や機構要素の配置に自由度が高いため様々なロボットの機構に用いられてきた. 中でも鋼鉄製のワイヤロープが強度に優れているため,多用されてきた背景があり,ワイヤ駆動機構とも呼ばれる.
しかし,近年も開発が進む合成樹脂を材料とした化学繊維ロープは鋼鉄製ワイヤロープを超える強度を持つものが少なくない. 加えて軽量,柔軟も優っており,腱駆動機構の設計自由度をさらに広げる可能性がある. そこで我々の研究室では化学繊維ロープを用いた腱駆動機構の設計指針の確立を大局的な目標として, 鋼鉄製ワイヤロープでは実現できなかった腱駆動ロボットの具現化によりその有効性を示す研究に取り組んでいる.
曲げによる強度低下
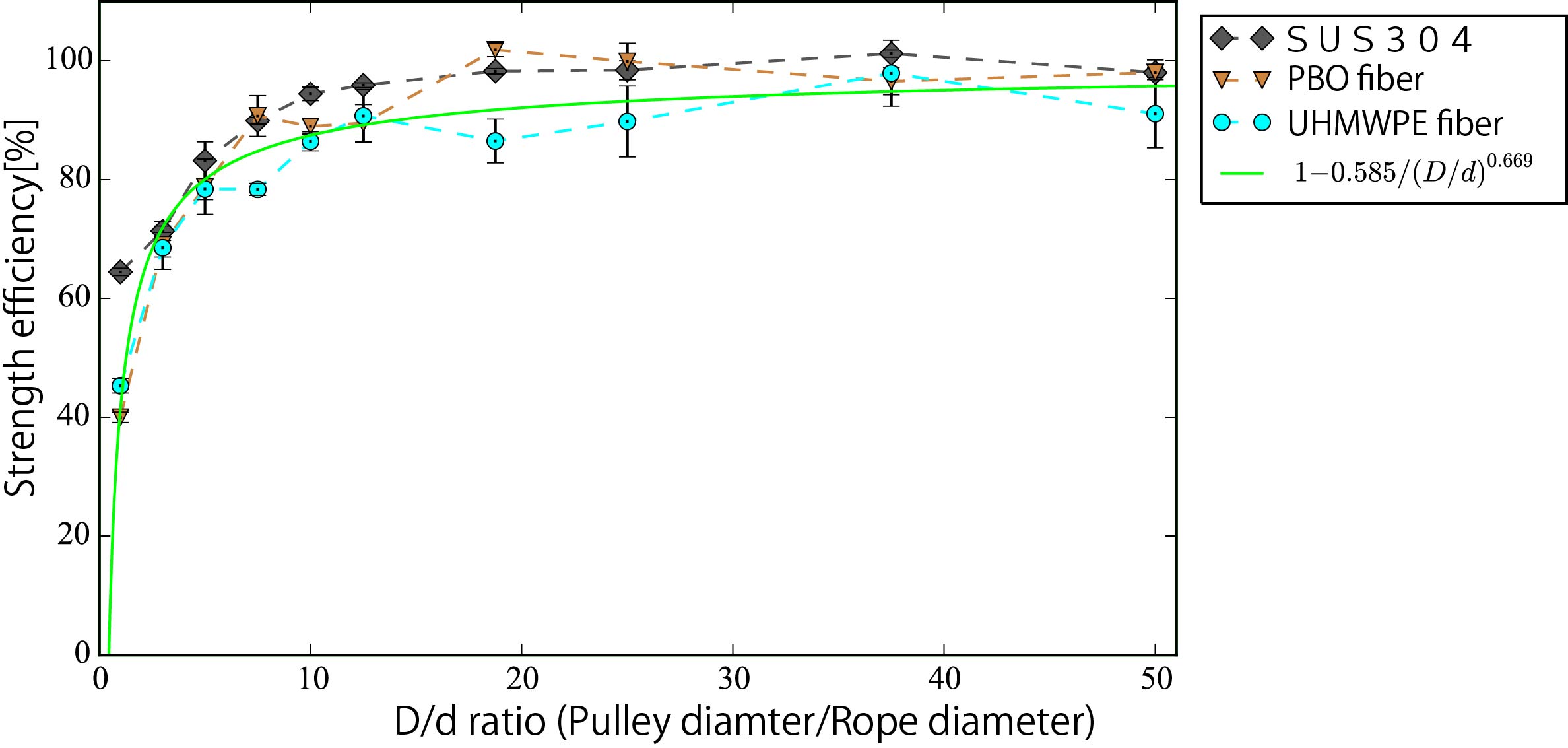
(2014年~)腱駆動機構の設計において最も重要なものは曲げによる強度低下である. 曲げは固定された端部,腱を案内する滑車,モータで駆動されるリールなど至る所で生じ,機構の耐荷重を左右する. 特に,円筒に巻きかけられた状態のロープでは,何も巻きかけいない真っすぐのロープに比べ強度が落ちる. この強度低下を左右するパラメータとしては円筒の径Dとロープ径dの比D/dが知られている. D/dが大きいほど真っすぐな状態での強度に近く,小さいほど強度が低下する. 実際,金属製ワイヤロープについては,D/dが所定の値を下回らないよう国際規格(ISO)で定められている.
一方で,化学繊維ロープは駆動機構の要素として用いられてこなかったため,このような設計指針となる資料,データは少ない. そこで,D/dをパラメータとして化学繊維ロープの強度を測定し,鋼鉄製ワイヤロープと比較した. その結果の一部を図1に示す.化学繊維ロープでも鋼鉄製ワイヤロープと同様に強度低下が起こることが明らかになった. 柔らかく曲げやすい化学繊維ロープを用いた場合でも金属製ワイヤロープの設計指針と同様に急峻な曲げがないよう設計する必要がある.
発表論文・学会
- Atsushi Horigome, Gen Endo. Basic study for drive mechanism with synthetic fiber rope -investigation of strength reduction by bending and terminal fixation method, Advanced Robotics, Volume 30, No. 3, pp. 206-217, Feb. 2016. [PDF]
端部固定法
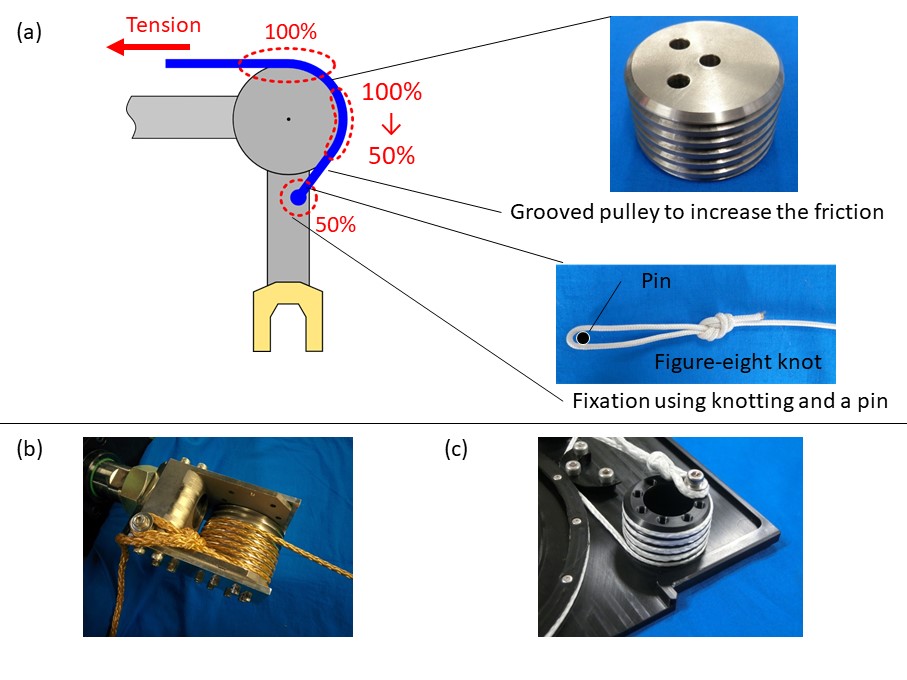
(2015年~)化学繊維ロープの特徴である滑りやすさはこれまで述べてきた曲げによる強度低下と相まって端部固定を難しくする. 腱駆動機構では被駆動部,駆動部で腱の端部を部材に固定しなくてはならない. 鋼鉄製ワイヤロープではカシメやクランプといった摩擦締結が用いられるが化学繊維ロープの小さな摩擦では締結力が小さく,強度を生かせない.結び目をつくってピンに掛ける締結法では曲げによって大きく強度を損なってしまう.
そこで,図3(a)に示す溝付きプーリを用いた端部固定手法を提案した. これは,ロープを溝付きプーリに複数回巻きかけた後,結びとピンによる締結を行う手法である. 溝付きプーリに巻きかけることで,強度低下を起こさないD/dを確保したまま摩擦により張力を 結びとピンによる最終締結部が耐えられるレベルまで低減させる. 結び方についても様々な方法を検討し,破断強度比50%まで耐えれる2重8の字結びを採用した. 溝付きプーリの寸法については,まず,最も締結力が得られる溝角度を静力学から導出した. さらに,溝角度,溝底径が異なる溝付きプーリを製作し,実際に締結力を測定した. 静力学解析と実験結果は相違点があるものの,三種の化学繊維ロープにて破断強度比90%を超える締結力を確認した. 加えて,最適な溝形状に近いメートルネジで代用した場合でも80%以上の締結力を確認した. 最後に,これまでの実験は直径2 mmのロープについて行ったが,径が異なるロープ(直径1~3 mm)についても寸法相似な溝付きプーリを用いることで十分な締結力が確保できることを確認した. 図3(b)は長尺ロボットアームを駆動する直径5.5 mmロープの端部固定箇所である. 同様に図3(c)は同ロボットアームの直径2 mmロープの端部固定箇所である. このように溝付きプーリ,結びとピン固定を用いた端部固定法がロボットの設計に応用されている.
発表論文・学会
- Atsushi Horigome, Gen Endo, Atsushi Takata, Youki Wakabayashi. Development of New Terminal Fixation Method for Synthetic Fiber Ropes, IEEE Robotics and Automation Letters, IEEE, Vol. 3, Issue 4, pp. 4321-4328, June 2018. [PDF]
- Atsushi Horigome, Gen Endo, Atsushi Takata, Youki Wakabayashi. Development of New Terminal Fixation Method for Synthetic Fiber Ropes, IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS2018), IEEE Robotics and Automation Letters, IEEE, Volume 3, Issue 4, pp. 4321-4328, Oct. 2018. [PDF]
- 遠藤玄, 堀米篤史, 若林陽輝, 高田敦. 高強度化学繊維を用いたワイヤ駆動系のための基礎的検討 (溝付きプーリと二重8の字結びによる端部固定), 日本機械学会論文集, 一般社団法人日本機械学会, Vol. 84, No. 864, pp. 18-00067, June 2018. [PDF]
屈曲耐久性
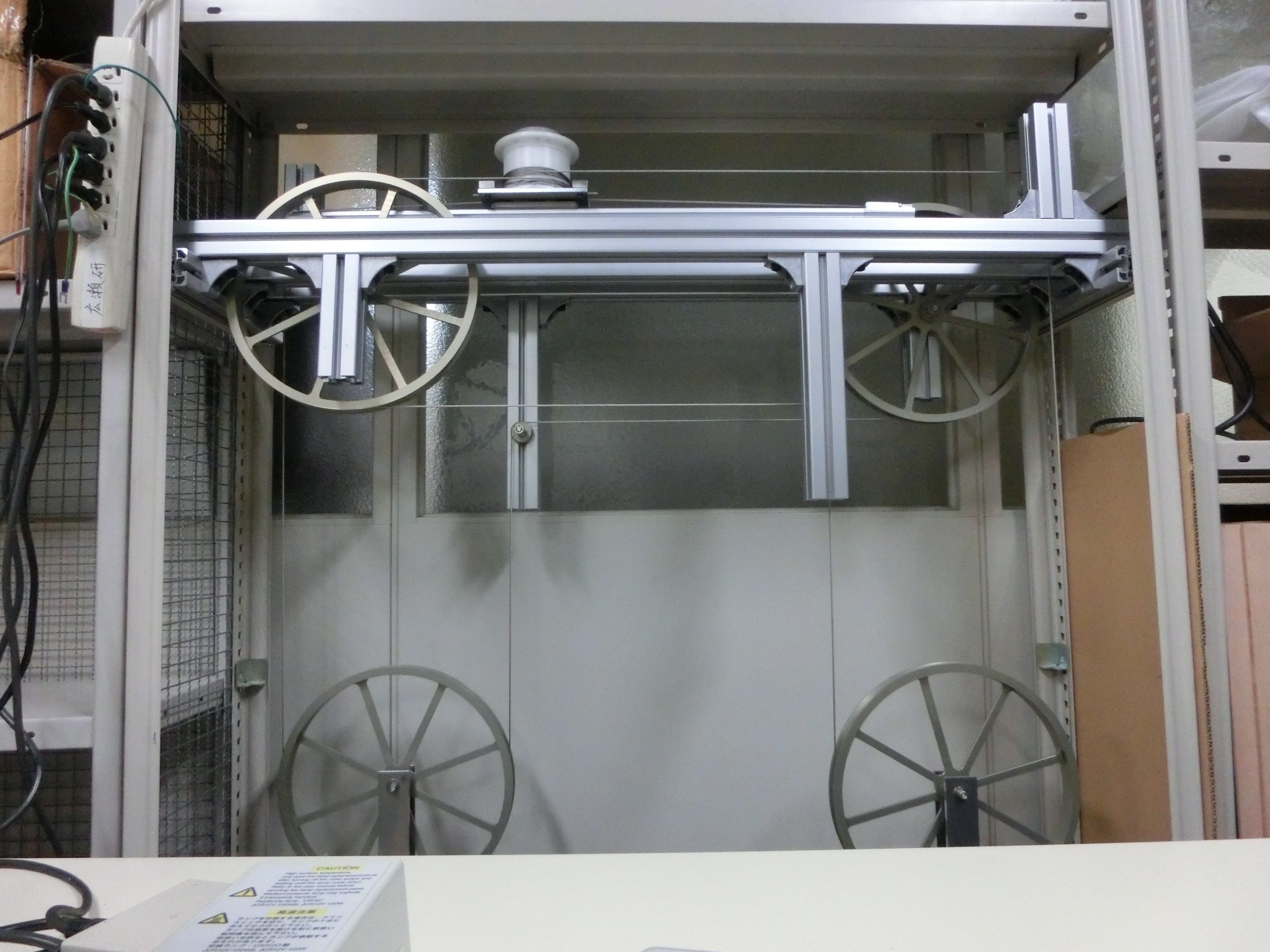
(2014年~)ロボットアームの関節を腱駆動する場合,腱は繰り返し曲げにさらされる. そのため,曲げによる強度低下だけでなく,屈曲による耐久性の把握も重要となる. 前述のD/dは屈曲耐久性についてもパラメータとされている. 日本工業規格(JIS)では,航空機に用いられる鋼鉄製ワイヤロープの耐久性の試験方法が定められており, 所定の条件で繰り返し屈曲させた後の破断強度が屈曲させる前の強度の60%を超えることが求められている.
そこで,図2に示す日本工業規格(JIS)をもとに試験機を製作し,化学繊維ロープの屈曲耐久性を評価した. 試験機の形態は日本工業規格に準拠したが,試験条件についてはJISで定められた条件よりも厳しい条件でも実施した. 例えば,D/dが小さい場合,試験ロープに加える張力が大きい場合,屈曲回数が大きい場合である. 日本工業規格に準拠した試験の結果,超高分子量ポリエチレン製ロープではほとんど強度が低下せず,航空機の駆動に用いられる鋼鉄製ワイヤロープに匹敵する耐久性を示した. 他の化学繊維材料のロープでは繰り返し屈曲による強度低下が大きかった. また,D/dが小さい厳しい条件の試験結果では,化学繊維ロープに比べ,鋼鉄製ワイヤロープの強度低下が大きかった. 以上から,超高分子量ポリエチレン製ロープは屈曲耐久性に優れ,かつ急峻な曲げでも強度低下が小さいため, 鋼鉄製ワイヤロープを用いた場合よりもコンパクトな機構を設計できると考えられる.
発表論文・学会
- Atsushi Horigome, Gen Endo. Investigation of Repetitive Bending Durability of Synthetic Fiber Ropes, IEEE Robotics and Automatoin Letters, Vol. 3, No. 3, pp. 1779-1786, Jan. 2018. [PDF]
- Atsushi Horigome, Gen Endo. Investigation of Repetitive Bending Durability of Synthetic Fiber Ropes, IEEE/International Conference on Robotics and Automation(ICRA2018), IEEE Robotics and Automation Letters, IEEE, Volume 3, Issue 3, pp. 1779 - 1786, May 2018. [PDF]
- 高田 敦, 遠藤 玄, 兼清 真人, 鈴森 康一, 難波江 裕之. 高強度化学繊維によるワイヤ駆動のための基礎的検討 第六報:熱延伸されたUHMWPEロープの繰り返し曲げ耐久性, 日本機械学会ロボティクス・メカトロニクス講演会2018, ロボティクス・メカトロニクス講演会2018 予稿集, 一般社団法人 日本機械学会, June 2018. [PDF]
- Atsushi Horigome, Gen Endo, Koichi Suzumori. Strength of Synthetic Fiber Ropes Degraded by Repetitive Bending, The 6th International Conference on Advanced Mechatronics (ICAM2015), Proceedings of the 6th International Conference on Advanced Mechatronics, The Japan Society of Mechanical Engineers, No. 15-210, pp. 27-28, Dec. 2015. [PDF]
- 堀米篤史, 遠藤玄, 鈴森康一. 高強度化学繊維によるワイヤ駆動のための基礎的検討―第二報:繰り返し曲げが引張強度に与える影響―, 日本機械学会ロボティクス・メカトロニクス講演会2015, ロボティクス・メカトロニクス講演会2015 予稿集, 一般社団法人 日本機械学会, pp. 2A1-Q08, May 2015. [PDF]