ツンモリハンド
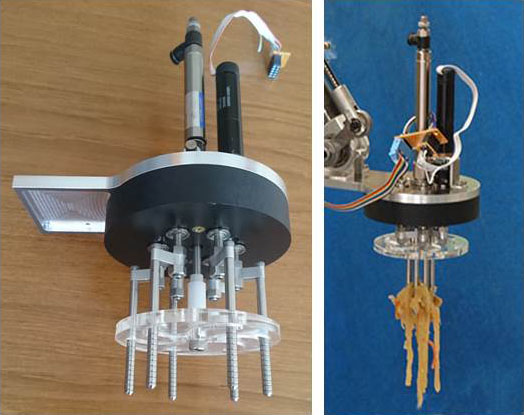

(2013-2018)食品産業は労働集約型であり,ロボットによる自動化が望まれている分野である. 従来の二本指のハンドや真空吸着では掴むことが難しかった,麺類や線状の惣菜を,同期開閉する指で掴むことができるロボットハンドである. 指の開き具合や食品への差し込み量を調節することで把持量が調節できる.また惣菜の盛り付けでは食品が円錐形状に「つんもり」と置かれることから美味しそうに見える,という効果もある.粘着性の食品も,直動する円板でしごき落とすことができる.
計量・包装・検査機器メーカである(株)イシダとの共同研究を行い,その成果の一部は マッチング計量器GCW-Vのハンドとして製品化された.
発表論文・学会
レンズハンド

(2007-2009)デジタルカメラなど光学精密機器の生産では,円盤状のレンズを頻繁に扱う.この際,レンズ表面を傷つけないようにレンズの縁を持って取り扱う必要があり,現状ではすべて人手によって行われている.
レンズハンドは,人と共存する環境でレンズの置く場所や向きを変える作業を行うことを目指して開発された. レンズの縁のみをもって縦から横,横から縦に姿勢を変えることが出来る.通常このような作業を実現しようとすると,2本指のグリッパでつかみ,グリッパそのものを手首で回転させることでレンズの姿勢を変化させる.しかしレンズそのものは軽量であるのに,グリッパの方が格段に重いため効率的ではない.そこでこのハンドはレンズをつかんだ指先だけを回転させることで省電力化に成功した.また指先が回転ローラになっていることで縦に置かれた状態からもレンズを巻き上げるようにして掴むことが出来る.
発表論文・学会
- 遠藤玄, 広瀬茂男, 山田浩也: 円筒回転指先を持つ円盤状物体ハンドリンググリッパの開発, SICE SI部門講演会, 1N1-3 (2009)
- 遠藤玄, 山田浩也, 広瀬茂男: 軽作業用ハンド・アームシステムの開発-円筒回転指先をもつグリッパによる円盤状物体ハンドリング作業-, 計測自動制御学会論文集 , Vol. 47, No.12, pp.640-647 (2011) [PDF]
- Gen Endo, Hiroya Yamada, Shigeo Hirose, Development of a Light Duty Arm with an Active-Fingertip Gripper for Handling Discoid Objects, IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp.2600-2605 (2010) [PDF]