教育用1自由度グライド推進移動体 "魚太郎IIIa号機"
(2009-2013年) 従来,小中学生向け教育用ロボットというと価格の制約から使用できるモータは1つか2つで,リンク機構により定型の動作を行う市販の組み立てキットか,差動2輪駆動の車輪型ロボットが主に用いられていたが,その動作原理そのものはすぐに理解が出来,工夫や改善の余地が少なかった.また本来進路選択時期で最も大きな影響力がある高校生に向けた教育ロボットは,ほとんど市販されていない.
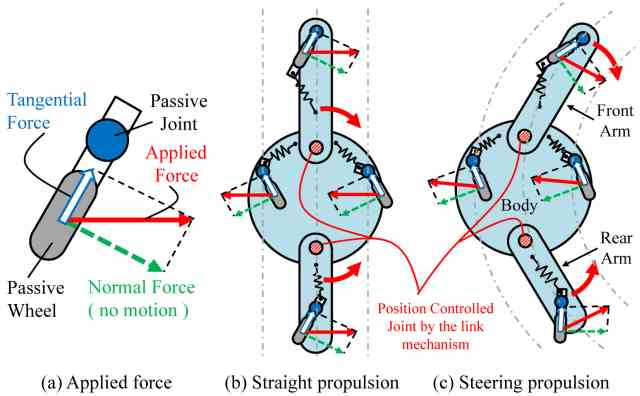
本ロボットは,魚やヘビがくねることによって進む原理を説明するために製作された教育用ロボットである.1つのラジコン用サーボモータで頭と尻尾をくねらせて前に進み、曲がることも出来る.魚は細長い形をしており、体に沿った縦向きには水の抵抗が少なく、横方向には大きな抵抗がある.ヘビの腹部には体に沿ってエッジのような鱗があり、魚と同様、細長い縦向きには滑りやすく、横方向には滑りにくい性質がある.このようなくねりによる推進はアイススケートやローラースケートと原理的には同じであり,一見してその推進原理が分かりにくく,不思議に見えることから子供たちの興味を引くことが出来る.
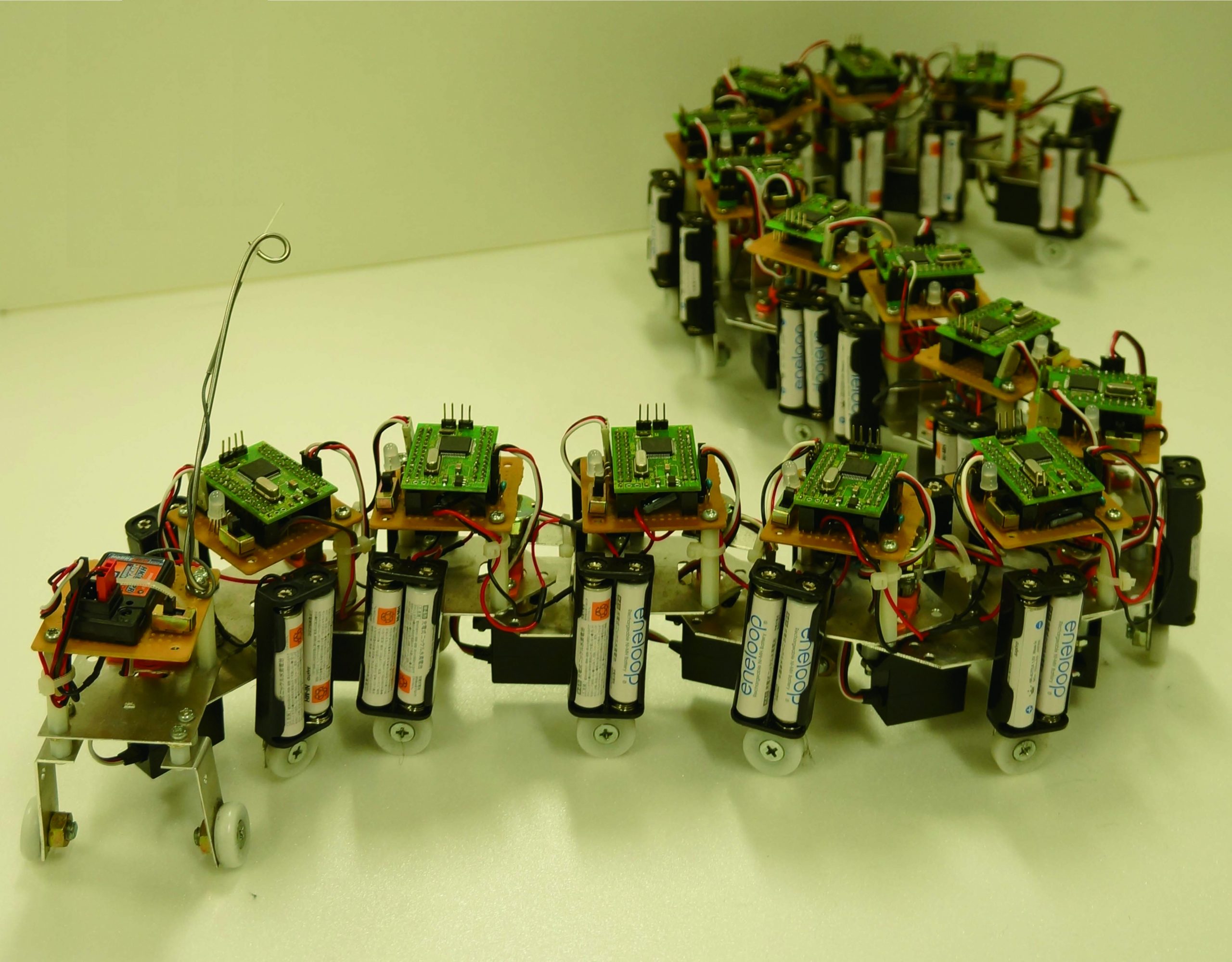
魚太郎IIIa号機 (Fig.1) は、頭と尻尾、そして胴体に合計4つの首振り受動キャスタがあり,縦方向には滑りやすく、横方向には滑りにくい性質を付加している.首振りキャスタの向きはゴムで支えられているため,頭と尻尾をくねらせることで斜めに変化する.車輪が斜めになると頭と尻尾を左右に振る力の一部を前進する力に変えることが出来るため,まるで地上を泳ぐように滑らかに進むことが出来る(Fig.2).また頭や尻尾の長さやゴムの強さを調節することで推進特性を変化させることが可能である.
本ロボットを用いて小学生向けには操作体験(Fig.3),中学生向けには組み立て実習やサーボの説明,高校生向けには三角関数とリンク機構の設計,など様々な教育プログラムを実施することが可能である.特に高校生向けには製作マニュアル(Fig.4)や講義教材なども完備されており,学校教育用途であれば無償で提供可能である.科学館などへのロボット貸し出しも行っている.
|
Fig.1 魚太郎IIIa号機外観 |
Fig.2 推進原理 |
|
Fig.3 操縦体験 |
Fig.4 製作マニュアル |



発表論文・学会
- 広瀬茂男, 遠藤玄, 高岡峻一: 教育用1自由度グライド推進移動体“魚太郎III 号機”の開発, 第28回日本ロボット学会学術講演会, 1L2-5 (2010)[PDF]
- 遠藤玄, 山田浩也, 広瀬茂男: 1自由度グライド推進移動体“魚太郎IIIa号機”を用いた高校生向けロボット教材の開発, 第29回日本ロボット学会学術講演会, 2C2-4 (2011)[PDF]
- 遠藤玄, 広瀬茂男, 山田浩也: 受動車輪を用いた教育用魚型1自由度グライド推進移動体の開発-座学を実学として実感できる高校生向けロボット教材-, 日本ロボット学会誌, 第31巻,第2号,pp.124-132, (2013) [PDF]
- Gen Endo, Hiroya Yamada, Takeshi Aoki, Shigeo Hirose: Development of Biologically Inspired Educational Robots Based on Gliding Locomotion, Proc. Int. Conf. on Intelligent Robots and Systems, pp.3291-3296 (2013) [PDF]
任意節数接続可能な教育用ヘビ型ロボット "ACM-E1"
発表論文・学会