10-m-Long-Coupled Tendon-Driven Articulated Manipulator "Super Dragon"

(2016~)Super Dragon is a 10-m-long slender robotic arm with 10 joints. A long-reach robot arm is expected for inspection of hazardous narrow spaces, especially, Fukushima Daiichi Nuclear Power Plants. However, long body enhances the problem of gravitational torques. Thus, how to design and control such long reach robot arm are challenging researches.
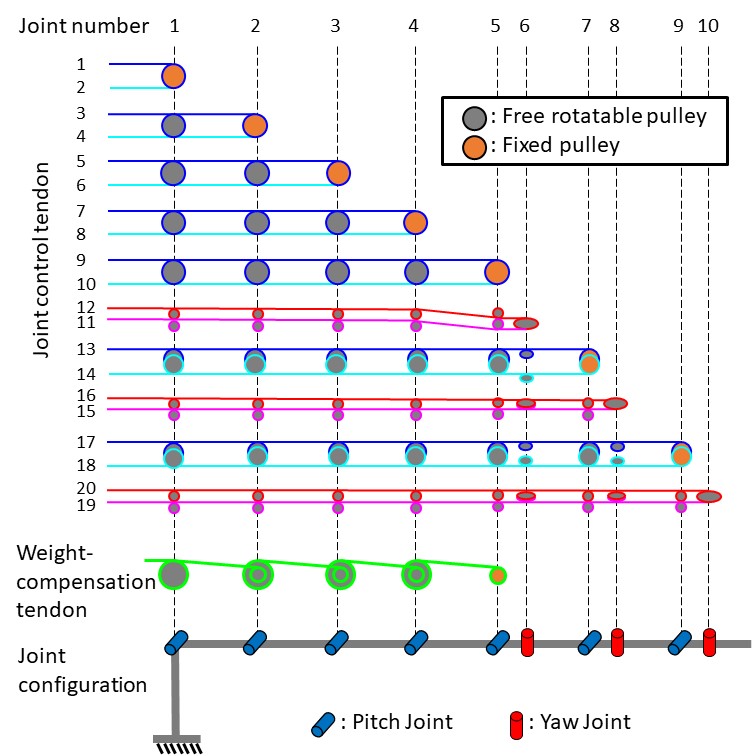
To support the weight of 10-m body, we introduced to our design mechanical ideas as follows: 1. Coupled tendon-driven mechanism, 2. Weight-compensation mechanism, 3. Synthetic fiber rope. Coupled tendon-driven mechanism consists of tendons and pulleys. Tendons pull and actuate joints. The important fact is that as same as human finger, a tendon actuating a distal joint generates torque on proximal joints. In other word, many tendons support a proximal joint which is highly loaded by gravity. Therefore, coupled tendon-driven mechanism is suitable design for long robot arm. Weight-compensation mechanism utilizes the same principle of coupled tendon-driven mechanism and support most of torque in five proximal joints. Synthetic fiber rope has higher strength than stainless steel wire rope with same diameter. How to implement mechanical design with synthetic fiber ropes is described in "Tendon-driven mechanism with synthetic fiber rope".
Huge gravitational joint torques cause a problem with joint control of a long-reach tendon-driven robot arm. An elastic elongation of tendons due to large tension by gravitational joint torques makes joint control unstable. To cope with this problem, the planning method of joint angle paths was proposed to keep off unstable posture. Modeling of synthetic fiber ropes as tendon, a tension control algorithm were also needed to study. Finally, the effectiveness of the proposal was demonstrated by manipulating a 5 kg payload using a 10-m-long robot arm.
| Length | 10 m |
| Body diameter | 0.2 m |
| Number of joints | 10 |
| Number of tendons | 21 |
| Weight of arm | approx. 50 kg |
| Weight of base | approx. 200 kg |
References
- G. Endo, A. Horigome and A. Takata, "Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator," in IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 934-941, April 2019, doi: 10.1109/LRA.2019.2894855. [PDF]
- 遠藤玄, 髙田敦, 堀米篤史. ワイヤ干渉駆動型超長尺多関節アームSuper Dragonの開発, 日本機械学会論文集, vol. 85, no. 875, Jun. 2019. [PDF]
- Takata, H. Nabae, K. Suzumori and G. Endo, "Tension Control Method Utilizing Antagonistic Tension to Enlarge the Workspace of Coupled Tendon-Driven Articulated Manipulator," in IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 6647-6653, Oct. 2021, doi: 10.1109/LRA.2021.3094489. [PDF]
- G. Endo, A. Horigome, A. Takata. Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator, IEEE/Int’l Conf. on Robotics and Automation(ICRA2019), MoB1-03.2, Montreal, May. 2019. [PDF]
- A. Takata, H. Nabae, K. Suzumori, G. Endo. “Tension Control Method Utilizing Antagonistic Tension to Enlarge the Workspace of Coupled Tendon-driven Articulated Manipulator,” IEEE/RSJ Int’l Conf. on Intelligent Robots and Systems(IROS 2021), TuCT19.4, Prague, Sep. 2021 [PDF]
- 遠藤玄, 堀米篤史, 髙田敦. 化学繊維ワイヤによる干渉駆動を用いた超長尺多関節アーム, 第24回ロボティクスシンポジア, 2A4, 黒部, Mar. 2019. [PDF]
- Atsushi Horigome, Gen Endo, Koichi Suzumori, Hiroyuki Nabae. Design of a Weight-compensated and Coupled Tendon-driven Articulated Long-reach Manipulator, 2016 IEEE/SICE International Symposium on System Integration (SII2016), Proceedings of the 2016 IEEE/SICE International Symposium on System Integration, IEEE, pp. 598-603, Dec. 2016. [PDF]
- 髙田敦, 難波江裕之, 鈴森康一, 木倉宏成, 高橋秀治, 遠藤玄. 化学繊維ロープを用いたワイヤ干渉駆動型多関節アームの安定性解析, 第39回日本ロボット学会学術講演会, 第39回日本ロボット学会学術講演会講演予稿集, 一般社団法人日本ロボット学会, 2I2-07, 上田, Sept. 2021. [PDF]
- 髙田敦, 難波江裕之, 鈴森康一, 木倉宏成, 高橋秀治, 遠藤玄. ワイヤ干渉駆動型超長尺多関節アームSuper Dragonの実規模スケールにおける探索動作の位置精度調査, 日本機械学会ロボティクス・メカトロニクス講演会2021, ロボティクス・メカトロニクス講演会2021講演論文集, 一般社団法人 日本機械学会, 2A1-O03, 大阪, June 2021. [PDF]
- 髙田敦, 難波江裕之, 鈴森康一, 遠藤玄. 自重補償機構を有するワイヤ干渉駆動型冗長マニピュレータの逆運動学, 第21回計測自動制御学会システムインテグレーション部門講演会, 3E1-04, 福岡, Dec. 2020. [PDF]
- 髙田敦, 遠藤玄, 鈴森康一, 難波江裕之. ワイヤ干渉駆動型超長尺多関節アームSuper Dragonの手先位置決め精度の検討, 日本機械学会ROBOMECH2019, 1A1-R10, 広島, Jun. 2019. [PDF]
- 堀米篤史, 遠藤玄, 鈴森康一. 超長尺ワイヤ駆動型多関節アームの開発―干渉ワイヤ駆動機構と自重補償機構による駆動方式の提案―, 日本機械学会ロボティクス・メカトロニクス講演会2016, ロボティクス・メカトロニクス講演会2016講演概要集, 一般社団法人 日本機械学会, 2P1-15a5, June 2016. [PDF]
Extended Super Dragon with Telescopic Boom

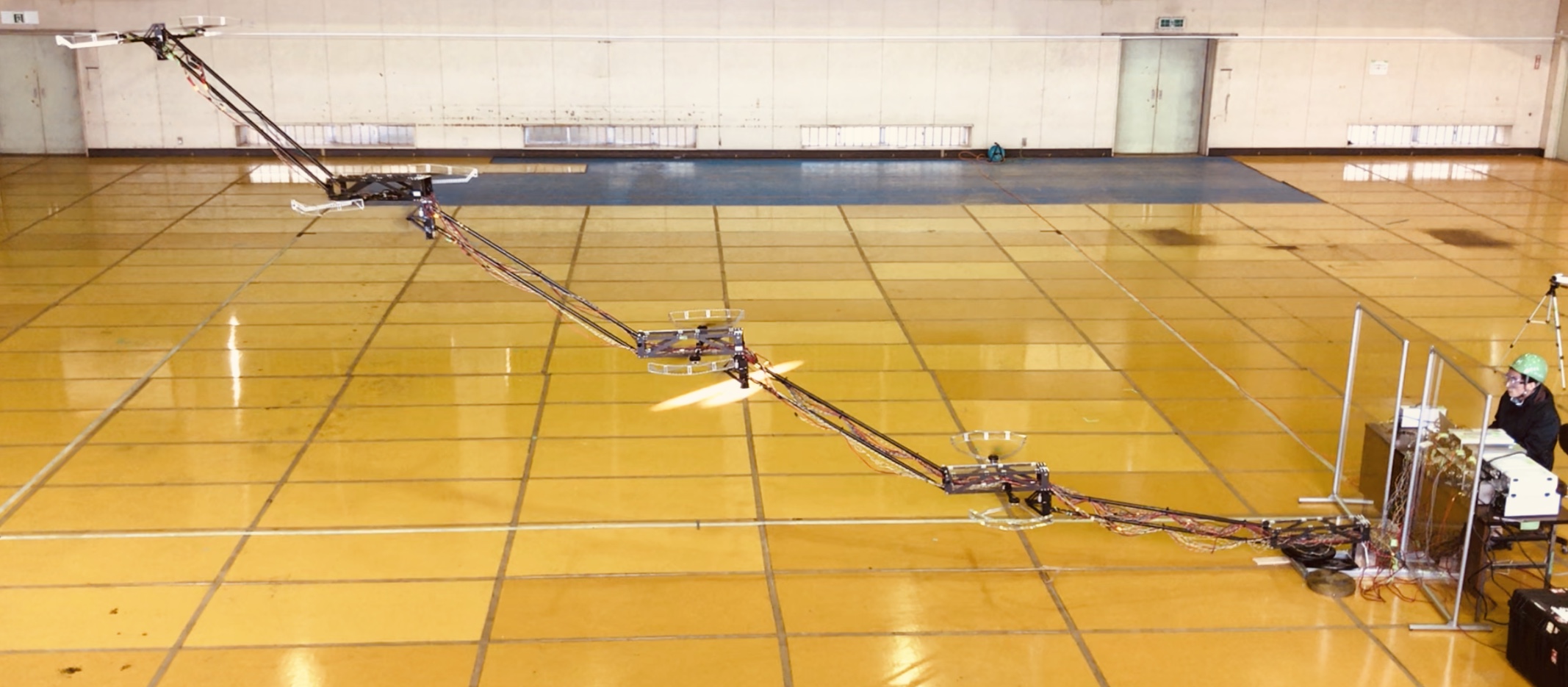
(2019~)Extended Super Dragon is a robotic system that integrated a telescopic linear arm in an articulated robot arm: Super Dragon. As shown in Figure 1, the telescopic linear arm is attached to the tip of Super Dragon. The total length of the integrated robot is up to 15.4 m.
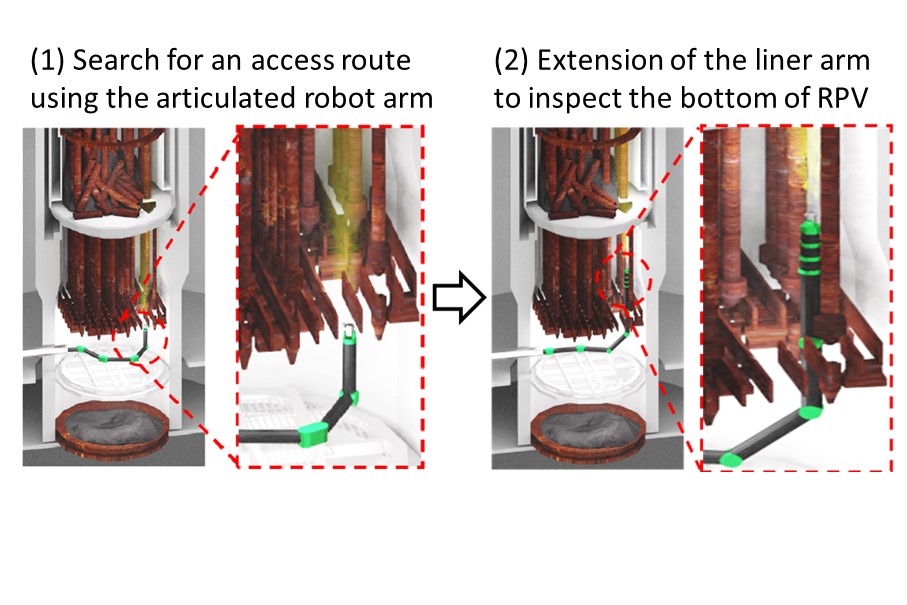
In the Fukushima Daiichi nuclear power plant, fuel debris may remain in the Reactor Pressure Vessel. Therefore, We have proposed an inspection plan that Extended Super Dragon inserts under the Reactor Pressure Vessel and moves linear arm upward. Figure 2 shows how to access the Reacter Pressure Vessel by the robot arm.
To realize the proposed inspection, we had developed a linear arm using a telescopic structure. The left of Figure 3 shows the arm when shortened and the right of Figure 3 shows when extended.
| Length when shortened | 2.1 m |
| Length when extended | 6.3 m |
| Max diamter | 0.08 m |
| Number of actuators | 1 |
| Number of extendable telescopic pipes | 3 |
| Weight of the linear arm | 6.3 kg |
Finally, we had integrated the linear arm and Super Dragon. In our previous studies, we attached cameras or weights up to 10 kg as payload to Super Dragon. However, the center of gravity of the linear arm is far from the most distal joint of Super Dragon and variable due to its extendable motion though it is light-weight. It means that the large momentum load and inertia of the linear arm may cause a problem of joint control. Therefore, we conducted two motion experiments to demonstrate the feasibility of our inspection proposal. In the former experiment, we showed that Super Dragon enables to manipulate the orientation of the linear arm from horizontal posture to upward posture. In the other experiment, the linear arm moves vertically and Super Dragon lifts itself including the linear arm from the ground as shown in Figure 1. Though the linear arm failed to extend its full range motion, the total length reached 13.7 m in the posture of Figure 1. Moreover, a camera attached to the tip of the liner arm achieved to capture a target mark installed on a building's wall. And also, we processed the captured images using Structure from motion and obtained 3D points cloud as shown in Movie 2.

References
- 鄭冰, 難波江裕之, 鈴森康一, 木倉宏成, 高橋秀治, 遠藤玄. 原子炉圧力容器調査のための軽量テレスコピックブームの開発, 日本機械学会ロボティクス・メカトロニクス講演会2021, ロボティクス・メカトロニクス講演会2021講演論文集, 一般社団法人 日本機械学会, June 2021. [PDF]
- (予定)遠藤玄, 永井敏也, 髙田敦, 木倉宏成, 高橋秀治. 拡張型スーパードラゴン多関節ロボットアームによる遠隔探査手法の開発(2)多関節ロボットアームの開発, 日本原子力学会 2022年春の年会, March 2022.
- (予定)永井敏也, 鄭冰, 髙田敦, 木倉宏成, 高橋秀治, 遠藤玄. 直動型テレスコピックブームによる 拡張型Super Dragon 多関節ロボットアームの開発, 日本機械学会ロボティクス・メカトロニクス講演会2022, ロボティクス・メカトロニクス講演会2022講演論文集, 一般社団法人 日本機械学会, June 2022.
Super Long Reach Articulated Manipulator Driven by Thrusters "Hiryu-II"
.png)
.png)
In the first prototype "Hiryu-I," the yaw axis torque driven in the left-right direction accumulated in the base of the prototype as it became longer, exceeding the rated torque of the servomotor and causing it to become uncontrollable. Therefore, "Hiryu-II" uses thrusters to drive the yaw axis as well. Figure 1 shows the overview of "Hiryu-II. The yaw axis thruster is equipped at the tip of each node, which allows the moment arm to be long enough to generate a large driving torque.
In addition, the parallel linkage mechanism is twisted around the longitudinal direction as it becomes longer, causing the thrusters to tilt and reducing the controllability of the yaw axis. To solve this problem, we introduced Inertial Measurement Units (IMUs) on each segments and thrust force difference between left-and-right thrusters.
The second prototype "Hiryu-II" of 6.6m-long model has successfully achieved end-position control and floating while holding a 0.6 kg payload. By extending the link length, prototypes with total lengths of 8.8 m and 12 m have also successfully floated (Figures 2 and 3).
References
- Yusuke Ueno, Tetsuo Hagiwara, Hiroyuki Nabae, Koichi Suzumori, Gen Endo. Development of Hiryu-II: A Long-Reach Articulated Modular Manipulator Driven by Thrusters, IEEE Robotics and Automation Letters, Vol. 5, Issue 3, pp.4963-4969 (2020) [DOI]
- Yusuke Ueno, Tetsuo Hagiwara, Hiroyuki Nabae, Koichi Suzumori, Gen Endo. Empirical Study of a Long-Reach Articulated Modular Manipulator Driven by Thrusters, IEEE/SICE Int. Symposium on System Integration (SII), pp. 452-458 (2022) [DOI]
Long Reach Arm with Gravity Compensation using Thrusters "Hiryu-I"
.jpg)
.jpg)
(2017~2018) "Hiryu", a thruster-driven lightweight long articulated arm, is a long robot arm that uses thrusters to compensate for its own weight. Conventional robot arms are equipped with actuators such as motors at each joint to drive the joints. However, the longer the length of this method, the greater the torque applied to the proximal joints, making it difficult to extend the length of the arm. A drone is an active research topics and potentially applicable to infrastructure inspection. However, conventional drones use a battery, and it is difficult to operate for the long periods of time required for the task. Additionally, because there is nothing to mechanically limit the range of movement, there are dangers such as unpredictable crash in the event of loss of control.
The "Hiryu" series is equipped with thrusters at each joint to compensate for the weight of the arm and drive the joints. This arm uses a propeller as a thruster. The axis of the thruster must always be kept in the vertical direction for the weight compensation. To achieve this, the arm uses a parallel link mechanism to keep the propeller axis vertical (Figure 1). The arm is wired for power and control signals along the link, allowing it to operate for long periods of time without worrying about running out of battery power. Furthermore, because the mechanism does not accumulate the gravity torque at the base, the number of nodes can be arbitrarily increased as long as a sufficient power supply is available.
References
- Gen Endo, Tetsuo Hagiwara, Yoshihide Nakamura, Hiroyuki Nabae, Koichi Suzumori, A Proposal of Super Long Reach Articulated Manipulator with Gravity Compensation using Thrusters, IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp.1414-1419 (2018) [PDF]