TITAN-E1
We are pleased to announce that our latest quadruped robot, "TITAN-E1," will be presented at JSME ROBOMECH 2022 in Sapporo! The sprawling-type quadruped robots, TITAN series, have been continuously developed at Tokyo Institute of Technology.
Lightweight Sprawling-type Quadruped Robot "TITAN-XIII"
References
- Satoshi Kitano, Shigeo Hirose, Gen Endo, Edwardo F. Fukushima, Development of Lightweight Sprawling-type Quadruped Robot TITAN-XIII and its Dynamic Walking, Int. Conf. on Intelligent Robots and Systems (IROS), pp.6025-6030 (2013)[PDF]
- Satoshi Kitano, Shigeo Hirose, Atsuhi Horigome, Gen Endo, TITAN-XIII: sprawling-type quadruped robot with ability of fast and energy-efficient walking, ROBOMECH Journal, Vol. 3, No.8, DOI: 10.1186/s40648-016-0047-1 (2016)
Quadruped Robot Equipped with Active Ankle "TITAN-XII"
References
- Hirone Komatsu, Masaru Ogata, Ryuichi Hodoshima, Gen Endo, Shigeo Hirose, Development of Quadruped Walking Robot TITAN-XII and Basic Consideration about Mechanics of Large Obstacle Climbing, IFToMM Asian Conf. on Mechanism and Machine Science, ID112 (2012)[PDF]
- Hirone Komatsu, Gen Endo, Ryuichi Hodoshima, Shigeo Hirose, Edwardo F. Fukushima, Basic Consideration about Optimal Control of a Quadruped Walking Robot during Slope Walking Motion, Workshop on Advanced Robotics and its Social Impacts, pp.224-230 (2013)[DOI]
- Hirone Komatsu, Gen Endo, Ryuichi Hodoshima, Shigeo Hirose, Edwardo F. Fukushima, How to optimize the slope walking motion by the quadruped walking robot, Advanced Robotics, Vol.29, No.23 (2015) [DOI]
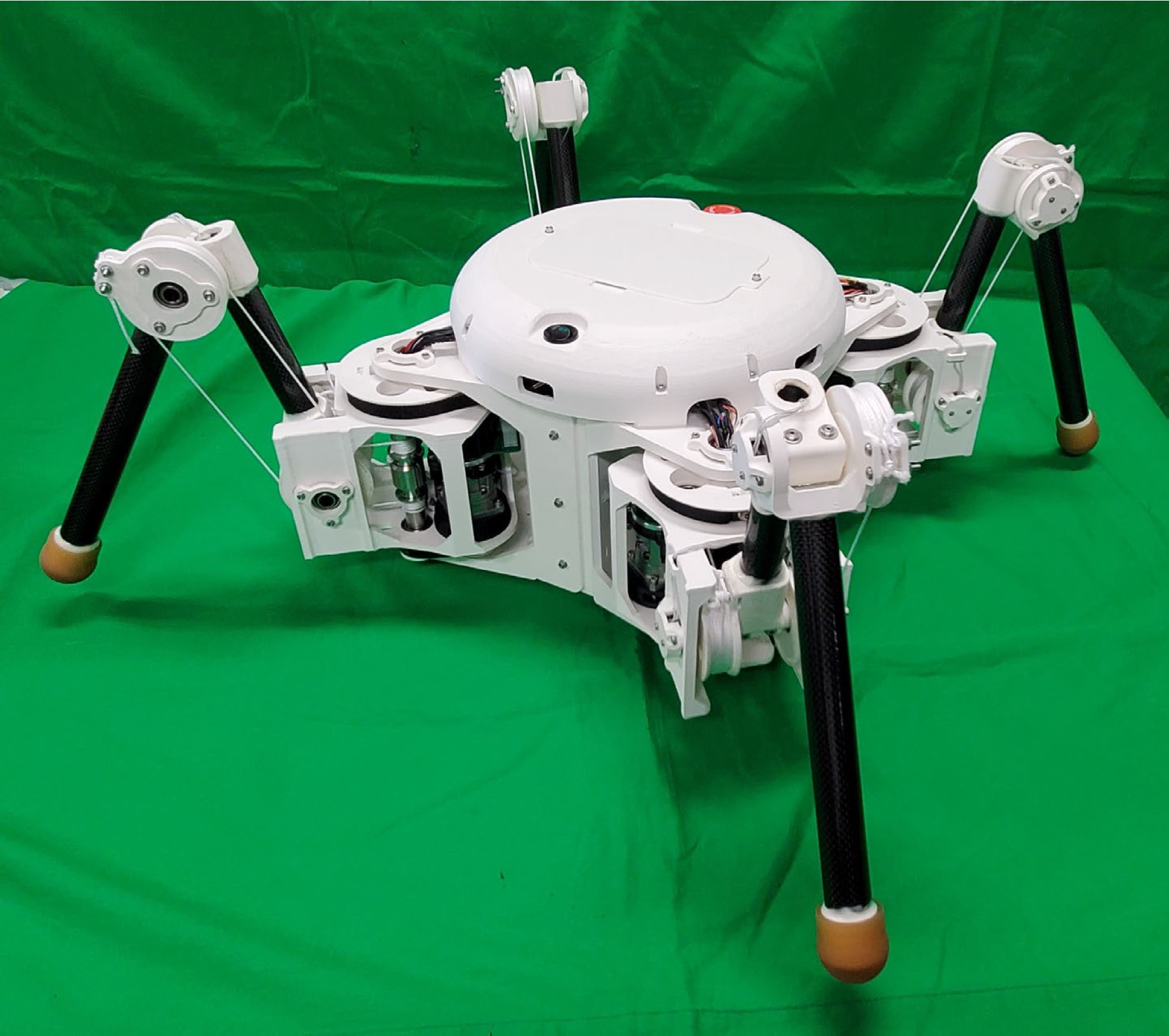
Agricultural Field Monitoring Robot "HexaLegs"

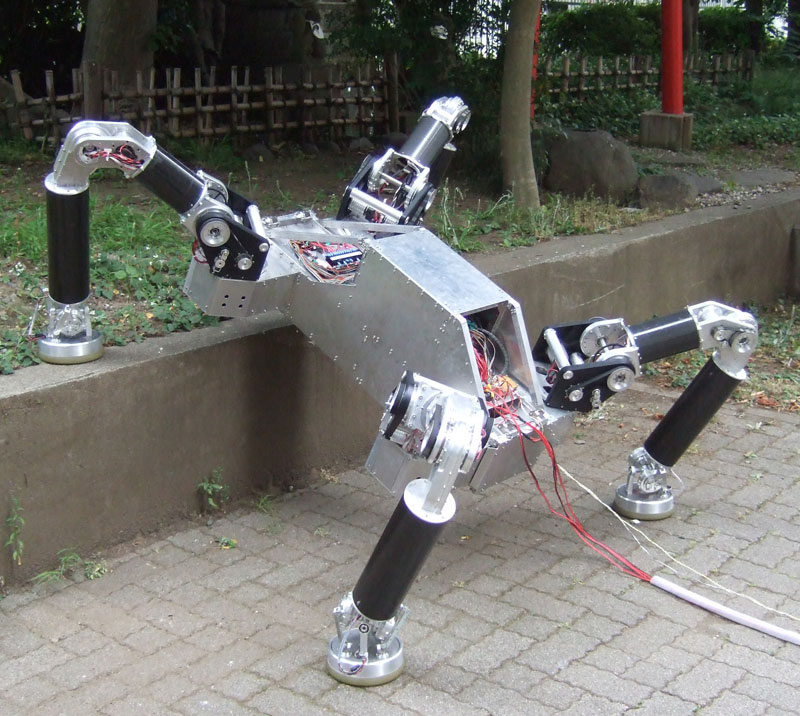
Leg-Wheel Hybrid Robot "Roller-Walker"
(1994-2012) Currently, a hybrid leg-wheel-type mobile robot that combines the characteristics of both a leg-type mobile robot with high traversing ability on uneven terrain and a wheel-type robot with high-speed movement on hard flat terrain is attracting attention. Most of the prototype vehicles developed to date have added active wheels to the leg tips or the body of a walking robot. These wheels are quite heavy because of the additional actuators for the drive and steering mechanisms. As a result, the legs could not swing quickly in the walking mode, limiting its ability as a walking robot.
To solve this problem, the proposed Roller-Walker has a mechanism in which the sole of the walking robot becomes a passive wheel when it flips the sole disc and propels itself like a roller skate by moving its legs (Figs. 1 and 2(a), (b)). Because of this structure, Roller-Walker's legs minimize additional mechanisms for wheeled locomotion and are lightweight. Since the drive system for walking is also used for wheeled mobility, the vehicle's entire system can be made lighter without extra degrees of freedom. Therefore, Roller-Walker can demonstrate high performance in both leg and wheel mobility. However, leg motion control methods for producing thrust and steering with passive wheels have not been studied at all in the world. For this reason, we investigated a method for generating leg trajectory motion specific to the Roller-Walker. Figures 3 and 4 show an example of the obtained motion.
The Roller-Walker (Fig. 1) is developed by modifying TITAN-VIII equipped with passive wheels and a variable ankle mechanism. The height is 0.25 m, left-right width 0.6 m, front-back length 0.5 m, and total mass 24 kg. The increase in weight due to the hybridization was kept to 7% of the total weight of TITAN-VIII. A parallel link mechanism using wires and pulleys keeps the camber angle of the wheels constant with respect to the main body regardless of the leg position.
On rough terrain, the robot performs walking like TITAN-VIII, and on hard flat terrain, it is propelled by symmetrical periodic movements of its trajectory, as shown in Fig. 3. We also derived leg trajectories for a steering motion and rotational motion (Figs. 4 and 5). The angle of inclination of the wheels in relation to the direction of travel plays the role of a transmission mechanism for propulsion, so the exact leg mechanism can be used for slope climbing to high-speed propulsion by adjusting the leg trajectories appropriately. High-speed propulsion experiments have confirmed that the robot can move straight at approximately 2.2 m/s, more than 10 times faster than walking. The efficiency of this movement was 8 times higher than that of walking.
|
Fig.1 Wheeled locomotion and trajectory |
Fig.2a Walking mode
Fig.2b Skating mode |
|
Fig.3 Leg trajectory refered from the body coordinate |
Fig.4 Figure 8 propulsion |
|
Fig.5 Rotational motion |


References
- Shigeo Hirose, Hiroki Takeuchi; Roller-Walker: A Proposal of New Leg-Wheel Hybrid Mobile Robot, Proc. Int. Conf. on Advanced Robotics, pp.917-922 (1995)
- Gen Endo, Shigeo Hirose, "Study on Roller-Walker: System Integration and Basic Experiments", Proc. Int. Conf. on Robotics and Automation, pp. 2032-2037 (1999)[PDF]
- Gen Endo, Shigeo Hirose; Study on Roller-Walker (Multi-mode Steering Control and Self-contained Locomotion), Proc. Int. Conf. on Robotics and Automation, pp. 2808-2814 (2000) [PDF]
- Gen Endo, Shigeo Hirose; Study on Roller-Walker - Improvement of Locomotive Efficiency of Quadruped Robots by Passive Wheels, Advanced Robotics, Vol. 26, Issue 8-9, pp. 969-988 (2012) [PDF]