弾性テレスコピックアーム搭載型不整地ロボット

在宅酸素療法用追従ロボット


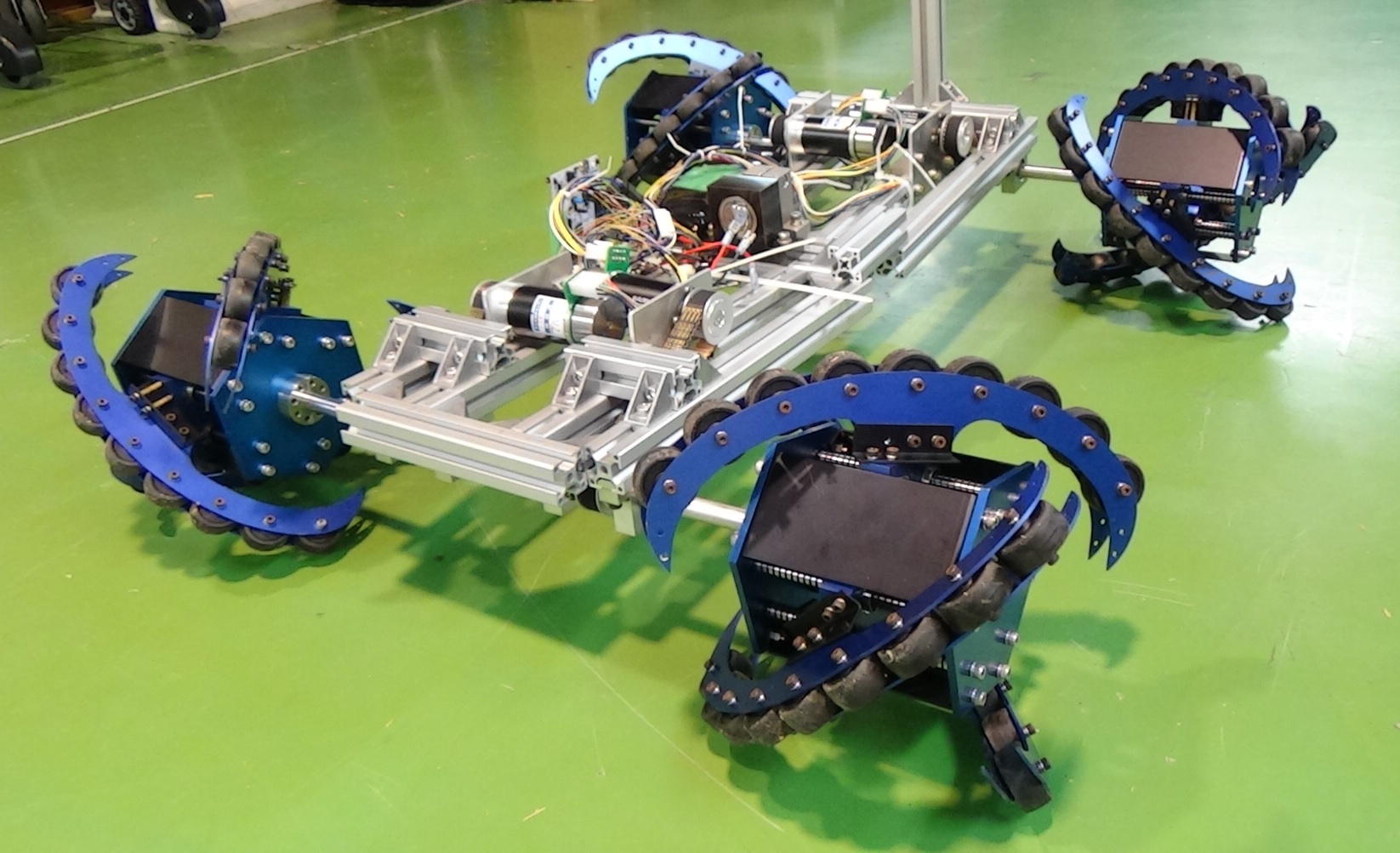
スパイラルメカナム車輪移動体
発表論文・学会
- 山田 紀之, 古村 博隆, 遠藤 玄, 鈴森 康一, 螺旋形状を持つメカナムホイールによる全方向移動車両の不整地走行実験, 日本機械学会ロボティクス・メカトロニクス講演会, 2A1-06b3,(2016) [DOI]
- Noriyuki Yamada, Hirotaka Komura, Gen Endo, Hiroyuki Nabae, Koichi Suzumori, Spiral Mecanum Wheel Achieving Omnidirectional Locomotion in Step-Climbing, Int. Conf. on Advanced Intelligent Mechatronics, pp.963-968 (2017) [DOI]
大径能動車輪ヘビ型ロボット "ACM-R8"

発表論文・学会
- 古村 博隆, 山田 浩也, 遠藤 玄, 福島 文彦, ヘビ型ロボットの首持上げ高さ最大化手法の提案, 第31回日本ロボット学会学術講演会, RSJ2013AC1M3-08 (2013) [PDF]
- 古村博隆, 山田浩也, 広瀬茂男, 遠藤玄, 鈴森康一, 低摩擦環境下での段差踏破能力に優れる揺動グローサの研究, 日本機械学会ロボティクス・メカトロニクス講演会, 1P2-F10 (2015) [PDF]
- 古村博隆, 山田浩也, 広瀬茂男, 遠藤玄, 鈴森康一, 大径車輪を搭載したヘビ型ロボットACM-R8の開発, 日本機械学会ロボティクス・メカトロニクス講演会, 2P1-D07 (2015) [DOI]
- Hirotaka Komura, Hiroya Yamada, Shigeo Hirose, Gen Endo, Koichi Suzumori, Study of Swing-Grouser Wheel: A Wheel for Climbing High Steps, Even in Low Friction Environment, Int. Conf. on Intelligent Robots and Systems, pp.415-4164,(2015)[DOI]
- Hirotaka Komura, Gen Endo, Hiroyuki Nabae, Koichi Suzumori, Turning Method that Minimizes Turning Radius for Snake-Like Robot with Active Joints and Active Wheels, Int. Symposium on System Integration, pp.604-609 (2016) [DOI]
- 古村博隆, 難波江裕之, 鈴森康一, 遠藤玄, 大径能動車輪を有するヘビ型ロボットACM-R8による不整地踏破フィールド試験, 計測自動制御学会システムインテグレーション部門講演会, pp.1109-1110 (2017) [PDF]
完全自立型索状能動体 "ACM-R1"
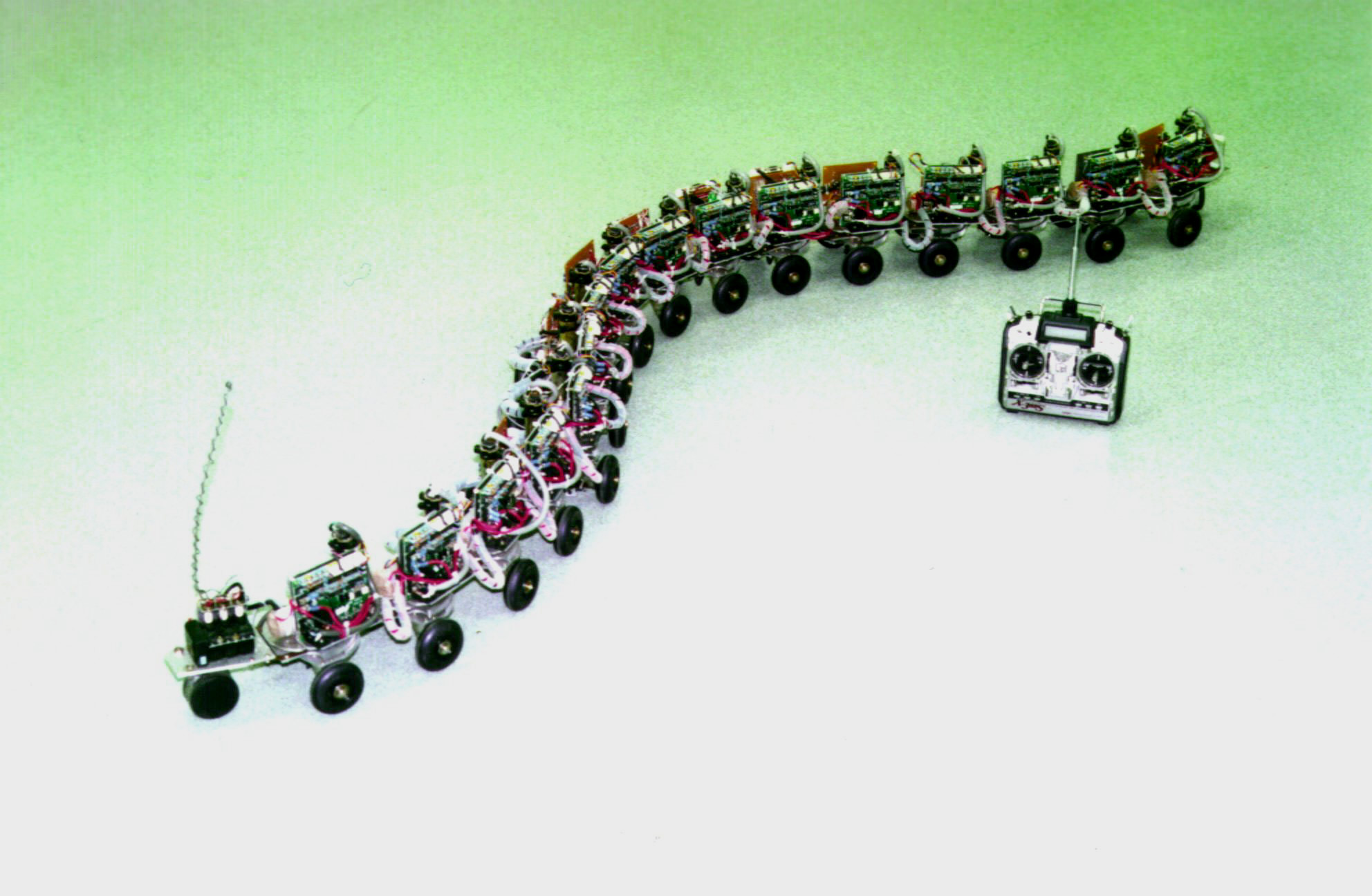
Fig.1 ACM-R1外観
(1995年~1999年)広瀬らは生物のヘビが行う典型的なくねりによる推進の原理を世界で初めて工学的に明らかにするとともに,「能動的に屈曲し得る関節ユニットを直列に多数連結し索状をなす機能体」として索状能動体(Active Cord Mechanism, ACM)と定義した.その機械モデルであるACM IIIにおいてヘビと同様の推進原理で滑走できることを明らかにした(1972年).ACM IIIは当時の技術環境から,移動体とは別に有線による大がかりな制御装置が必要であったが,およそ20年後の1995年当時,すでにコンピュータ・サーボドライバ・モータ・バッテリなど各デバイスの発展によって外部から制御信号・電源供給などを行わない完全自立システムを構成することが可能となった.
Fig.1は完全自立型索状能動体ACM-R1の外観である.ACM IIIに比してほぼ同じ大きさ・重量でありながら,全ての制御装置を搭載し,無線により推進速度・方向・くねりの大きさを操縦することが可能である.およそ30分の自立推進が可能となるだけでなく,移動速度も従来の2倍以上となり20数年の技術の進歩を反映した高い運動性能を示した.
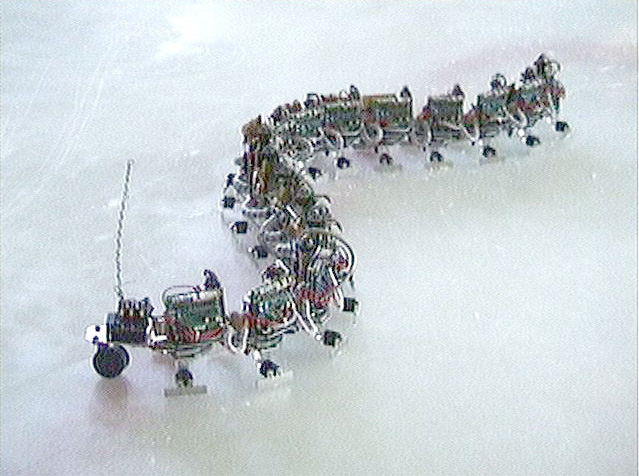
ヘビが行う典型的なくねりによる蛇行推進は原理的にアイススケート・ローラースケートなどと同様である.従来から「ウロコを地面に引っ掛けて進む」などヘビの蛇行推進には誤った記述が多く見られるが,ACM-R1により後退の動作を実現することで明確な反証を示した.また原理的な等価性を示すため,キャスタをスケートエッジに置き換えて氷上滑走実験を行い,0.5m/s程度で地上と全く同様に推進できることを確かめた(Fig.2).
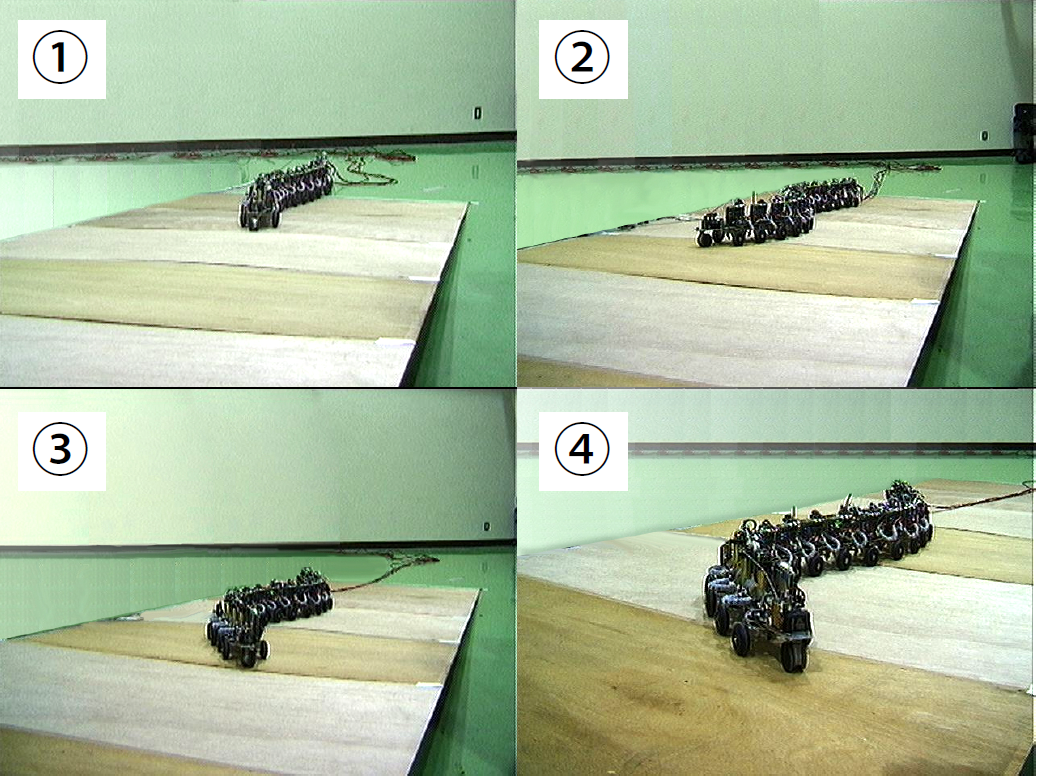
またヘビが全力滑走するとき,平坦地ではなるべく真っ直ぐな体型をし,傾斜面では大きな蛇行となる習性が知られている.これを制御則として用いることにより,傾斜面に応じてくねりの大きさを調節する対地適応的蛇行推進を提案し,実験により傾斜面にさしかかると蛇行が大きくなり登坂していく動作を実現した(Fig.3).
本ロボットの開発を契機として,一旦休止していたACMの研究開発は再興し,以降ACM-R8まで開発が進められるとともに,国際会議においてSnake-like Robotのセッションが開催されるまでに研究分野として発展することとなった.
|
Fig.2 氷上滑走実験 |
Fig.3 対地適応推進による登坂 |
発表論文・学会
- 広瀬茂男,生物機械工学,工業調査会 (1987)
- 広瀬茂男,遠藤玄,完全自律型索状能動体“ACM-R1”の開発,日本機械学会ロボティクス・メカトロニクス講演会,pp.309-310 (1997)
- 遠藤玄,外川圭司,広瀬茂男,索状能動体“ACM-R1 ”による対地適応推進の研究,日本機械学会ロボティクス・メカトロニクス講演会,1AII1-3(1)(2) (1998)
- 遠藤玄,広瀬茂男,外川圭司,グライド推進の提案,第16回日本ロボット学会学術講演会,pp.209-210 (1998)
- Gen Endo, Keiji Togawa, Shigeo Hirose. Study on Self-contained and Terrain Adaptive Active Cord Mechanism, Int. Conf. on Intelligent Robots and Systems, pp. 1399-1405 (1999) [PDF]
- 遠藤玄, 外川圭司, 広瀬茂男. 索状能動体に関する研究 -システムの自立化と対地適応推進-, 日本ロボット学会誌, Vol. 18, No. 3, pp. 419-425 (2000)[PDF]